Compare commits
10 Commits
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
471722f495 | ||
|
|
5e66140fbc | ||
|
|
ef8de0e6f0 | ||
|
|
d495b26d2d | ||
|
|
e992079e08 | ||
|
|
0aa30138ff | ||
|
|
aa11627383 | ||
|
|
5c132afbf5 | ||
|
|
b4feae42b4 | ||
|
|
b867398408 |
@@ -65,11 +65,13 @@ uint8_t i2c_start(uint8_t address)
|
||||
return 0;
|
||||
}
|
||||
|
||||
uint8_t i2c_transmit(uint8_t address, uint8_t* data, uint16_t length, uint16_t timeout)
|
||||
int8_t i2c_transmit(uint8_t address, uint8_t* data, uint16_t length, uint16_t timeout)
|
||||
{
|
||||
//xprintf("i2c_transmit(0x%x, 0x%x, %d, 0x%x) address:0x%x\n", address, data, length, timeout, address >> 1);
|
||||
i2c_address = address;
|
||||
i2cStart(&I2C_DRIVER, &i2cconfig);
|
||||
return i2cMasterTransmitTimeout(&I2C_DRIVER, (i2c_address >> 1), data, length, 0, 0, MS2ST(timeout));
|
||||
int8_t result = i2cMasterTransmitTimeout(&I2C_DRIVER, i2c_address, data, length, 0, 0, MS2ST(timeout));
|
||||
return result;
|
||||
}
|
||||
|
||||
uint8_t i2c_receive(uint8_t address, uint8_t* data, uint16_t length, uint16_t timeout)
|
||||
|
||||
@@ -42,7 +42,7 @@
|
||||
|
||||
void i2c_init(void);
|
||||
uint8_t i2c_start(uint8_t address);
|
||||
uint8_t i2c_transmit(uint8_t address, uint8_t* data, uint16_t length, uint16_t timeout);
|
||||
int8_t i2c_transmit(uint8_t address, uint8_t* data, uint16_t length, uint16_t timeout);
|
||||
uint8_t i2c_receive(uint8_t address, uint8_t* data, uint16_t length, uint16_t timeout);
|
||||
uint8_t i2c_transmit_receive(uint8_t address, uint8_t * tx_body, uint16_t tx_length, uint8_t * rx_body, uint16_t rx_length);
|
||||
uint8_t i2c_writeReg(uint8_t devaddr, uint8_t regaddr, uint8_t* data, uint16_t length, uint16_t timeout);
|
||||
|
||||
@@ -0,0 +1,227 @@
|
||||
/* Copyright 2017 Jason Williams
|
||||
* Copyright 2018 Jack Humbert
|
||||
* Copyright 2019 Clueboard
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#ifdef __AVR__
|
||||
#include <avr/interrupt.h>
|
||||
#include <avr/io.h>
|
||||
#include <util/delay.h>
|
||||
#else
|
||||
#include "wait.h"
|
||||
#endif
|
||||
|
||||
#include <stdint.h>
|
||||
#include <stdbool.h>
|
||||
#include <string.h>
|
||||
#include "is31fl3235a.h"
|
||||
#include "i2c_master.h"
|
||||
#include "progmem.h"
|
||||
#include "print.h"
|
||||
|
||||
|
||||
#define ISSI_REG_CONFIG 0x00 // FIXME: Not on 3235?
|
||||
#define ISSI_REG_CONFIG_PICTUREMODE 0x00 // FIXME: Not on 3235?
|
||||
|
||||
//#define ISSI_REG_AUDIOSYNC 0x06 // FIXME: Not on 3235?
|
||||
|
||||
#define ISSI_COMMANDREGISTER 0xFD // FIXME: Not on 3235?
|
||||
#define ISSI_BANK_FUNCTIONREG 0x0B // FIXME: Not on 3235?
|
||||
|
||||
#ifndef ISSI_TIMEOUT
|
||||
#define ISSI_TIMEOUT 100
|
||||
#endif
|
||||
|
||||
#ifndef ISSI_PERSISTENCE
|
||||
#define ISSI_PERSISTENCE 0
|
||||
#endif
|
||||
|
||||
// Transfer buffer for TWITransmitData()
|
||||
uint8_t g_3235a_transfer_buffer[20];
|
||||
|
||||
// These buffers match the IS31FL3235A PWM registers 0x05-0x20.
|
||||
// Storing them like this is optimal for I2C transfers to the registers.
|
||||
// We could optimize this and take out the unused registers from these
|
||||
// buffers and the transfers in IS31FL3235A_write_pwm_buffer() but it's
|
||||
// probably not worth the extra complexity.
|
||||
uint8_t g_rgb7seg_buffer[IS31FL3235A_COUNT][IS31FL3235A_LED_MAX];
|
||||
bool g_rgb7seg_buffer_update_required = false;
|
||||
|
||||
/* There's probably a better way to init this... */
|
||||
#if IS31FL3235A_COUNT == 1
|
||||
uint8_t g_3235a_control_registers[IS31FL3235A_COUNT][18] = {{0}};
|
||||
#elif IS31FL3235A_COUNT == 2
|
||||
uint8_t g_3235a_control_registers[IS31FL3235A_COUNT][18] = {{0}, {0}};
|
||||
#elif IS31FL3235A_COUNT == 3
|
||||
uint8_t g_3235a_control_registers[IS31FL3235A_COUNT][18] = {{0}, {0}, {0}};
|
||||
#elif IS31FL3235A_COUNT == 4
|
||||
uint8_t g_3235a_control_registers[IS31FL3235A_COUNT][18] = {{0}, {0}, {0}, {0}};
|
||||
#endif
|
||||
bool g_rgb7seg_control_registers_update_required = false;
|
||||
|
||||
void IS31FL3235A_write_register(uint8_t addr, uint8_t reg, uint8_t data) {
|
||||
g_3235a_transfer_buffer[0] = reg;
|
||||
g_3235a_transfer_buffer[1] = data;
|
||||
xprintf("IS31FL3235A_write_register(0x%x, 0x%x, 0x%x); g_3235a_transfer_buffer:0x%x\n", addr, reg, data, g_3235a_transfer_buffer);
|
||||
|
||||
#if ISSI_PERSISTENCE > 0
|
||||
for (uint8_t i = 0; i < ISSI_PERSISTENCE; i++) {
|
||||
if (i2c_transmit(addr, g_3235a_transfer_buffer, 2, ISSI_TIMEOUT) == 0) {
|
||||
break;
|
||||
}
|
||||
}
|
||||
#else
|
||||
if (i2c_transmit(addr, g_3235a_transfer_buffer, 2, ISSI_TIMEOUT) == -1) {
|
||||
// When we encounter a timeout ChibiOS says the bus must be reset as it's in an unknown state
|
||||
xprintf("i2c transmit timeout, resetting i2c bus!\n");
|
||||
i2c_stop(ISSI_TIMEOUT);
|
||||
wait_ms(5);
|
||||
i2c_start(ISSI_TIMEOUT);
|
||||
}
|
||||
#endif
|
||||
}
|
||||
|
||||
void IS31FL3235A_write_pwm_buffer(uint8_t addr, uint8_t *pwm_buffer) {
|
||||
// assumes bank is already selected
|
||||
|
||||
// transmit PWM registers in 9 transfers of 16 bytes
|
||||
// g_3235a_transfer_buffer[] is 20 bytes
|
||||
|
||||
// iterate over the pwm_buffer contents at 16 byte intervals
|
||||
for (int i = 0; i < IS31FL3235A_LED_MAX; i += 16) {
|
||||
// set the first register, e.g. 0x24, 0x34, 0x44, etc.
|
||||
g_3235a_transfer_buffer[0] = 0x24 + i;
|
||||
// copy the data from i to i+15
|
||||
// device will auto-increment register for data after the first byte
|
||||
// thus this sets registers 0x24-0x33, 0x34-0x43, etc. in one transfer
|
||||
for (int j = 0; j < 16; j++) {
|
||||
g_3235a_transfer_buffer[1 + j] = pwm_buffer[i + j];
|
||||
}
|
||||
|
||||
#if ISSI_PERSISTENCE > 0
|
||||
for (uint8_t i = 0; i < ISSI_PERSISTENCE; i++) {
|
||||
if (i2c_transmit(addr << 1, g_3235a_transfer_buffer, 17, ISSI_TIMEOUT) == 0)
|
||||
break;
|
||||
}
|
||||
#else
|
||||
if (i2c_transmit(addr << 1, g_3235a_transfer_buffer, 17, ISSI_TIMEOUT) == -1) {
|
||||
// When we encounter a timeout ChibiOS says the bus must be reset as it's in an unknown state
|
||||
xprintf("i2c transmit timeout, resetting i2c bus!\n");
|
||||
i2c_stop(ISSI_TIMEOUT);
|
||||
wait_ms(5);
|
||||
i2c_start(ISSI_TIMEOUT);
|
||||
}
|
||||
#endif
|
||||
}
|
||||
}
|
||||
|
||||
void IS31FL3235A_init(uint8_t addr) {
|
||||
wait_ms(2000); // Give QMK Toolbox time to attach
|
||||
xprintf("IS31FS3235A_init(0x%x)\n", addr);
|
||||
// In order to avoid the LEDs being driven with garbage data
|
||||
// in the LED driver's PWM registers, first enable software shutdown,
|
||||
// then set up the mode and other settings, clear the PWM registers,
|
||||
// then disable software shutdown.
|
||||
|
||||
// Reset settings to default
|
||||
//IS31FL3235A_write_register(addr, ISSI_REG_RESET_REG, 0);
|
||||
|
||||
// this delay was copied from other drivers, might not be needed
|
||||
wait_ms(10);
|
||||
|
||||
// This is how the Arduino code does init...
|
||||
uint8_t i = 0;
|
||||
|
||||
for (i=0x2A; i<=0x45; i++) {
|
||||
IS31FL3235A_write_register(addr, i, 0xFF); // Turn off all LEDs
|
||||
}
|
||||
|
||||
for (i=0x05; i<=0x20; i++) {
|
||||
IS31FL3235A_write_register(addr, i, 0x00); // Write all PWM set 0x00
|
||||
}
|
||||
|
||||
IS31FL3235A_write_register(addr, 0x25, 0x00); //update PWM&Control registers
|
||||
IS31FL3235A_write_register(addr, 0x4B, 0x01); //frequency setting 22KHz
|
||||
IS31FL3235A_write_register(addr, 0x00, 0x01); //normal operation
|
||||
|
||||
// This is how the Arduino code does LED turn on
|
||||
IS31FL3235A_write_register(addr, 0x05, 0xFF); // set PWM
|
||||
IS31FL3235A_write_register(addr, 0x25, 0x00); // update PWM&Control registers
|
||||
IS31FL3235A_write_register(addr, 0x08, 0xFF); // set PWM
|
||||
IS31FL3235A_write_register(addr, 0x25, 0x00); // update PWM&Control registers
|
||||
IS31FL3235A_write_register(addr, 0x12, 0xFF); // set PWM
|
||||
IS31FL3235A_write_register(addr, 0x25, 0x00); // update PWM&Control registers
|
||||
|
||||
// FIXME: This is for testing, turn on OUT1 at full brightness
|
||||
//IS31FL3235A_write_register(addr, 0x2A, 0xFF);
|
||||
//IS31FL3235A_write_register(addr, 0x05, 0x00);
|
||||
|
||||
// I think this finally turns it on?
|
||||
//IS31FL3235A_write_register(addr, 0x25, 0x00); //update PWM&Control registers
|
||||
//IS31FL3235A_write_register(addr, 0x4B, 0x01); //frequency setting 22KHz
|
||||
//IS31FL3235A_write_register(addr, 0x00, 0x01); //normal operation
|
||||
}
|
||||
|
||||
void IS31FL3235A_set_value(int index, uint8_t value) {
|
||||
/*
|
||||
if (index >= 0 && index < IS31FL3235A_LED_COUNT) {
|
||||
is31_led led = g_is31_leds[index];
|
||||
|
||||
// Subtract 0x24 to get the second index of g_rgb7seg_buffer
|
||||
g_rgb7seg_buffer[led.driver][led.v - 0x24] = value;
|
||||
g_rgb7seg_buffer_update_required = true;
|
||||
}
|
||||
*/
|
||||
}
|
||||
|
||||
void IS31FL3235A_set_value_all(uint8_t value) {
|
||||
for (int i = 0; i < IS31FL3235A_LED_COUNT; i++) {
|
||||
IS31FL3235A_set_value(i, value);
|
||||
}
|
||||
}
|
||||
|
||||
void IS31FL3235A_set_led_control_register(uint8_t index, bool value) {
|
||||
/*
|
||||
is31_led led = g_is31_leds[index];
|
||||
|
||||
uint8_t control_register = (led.v - 0x24) / 8;
|
||||
uint8_t bit_value = (led.v - 0x24) % 8;
|
||||
|
||||
if (value) {
|
||||
g_3235a_control_registers[led.driver][control_register] |= (1 << bit_value);
|
||||
} else {
|
||||
g_3235a_control_registers[led.driver][control_register] &= ~(1 << bit_value);
|
||||
}
|
||||
|
||||
g_rgb7seg_control_registers_update_required = true;
|
||||
*/
|
||||
}
|
||||
|
||||
void IS31FL3235A_update_pwm_buffers(uint8_t addr, uint8_t index) {
|
||||
//xprintf("IS31FS3235A_update_pwm_buffers(0x%x, %d)\n", addr, index);
|
||||
if (g_rgb7seg_buffer_update_required) {
|
||||
IS31FL3235A_write_pwm_buffer(addr, g_rgb7seg_buffer[index]);
|
||||
g_rgb7seg_buffer_update_required = false;
|
||||
}
|
||||
}
|
||||
|
||||
void IS31FL3235A_update_led_control_registers(uint8_t addr, uint8_t index) {
|
||||
if (g_rgb7seg_control_registers_update_required) {
|
||||
for (int i=0; i<18; i++) {
|
||||
IS31FL3235A_write_register(addr, i, g_3235a_control_registers[index][i]);
|
||||
}
|
||||
}
|
||||
}
|
||||
@@ -0,0 +1,141 @@
|
||||
/* Copyright 2017 Jason Williams
|
||||
* Copyright 2018 Jack Humbert
|
||||
* Copyright 2019 Clueboard
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
|
||||
#ifndef IS31FL3235A_DRIVER_H
|
||||
#define IS31FL3235A_DRIVER_H
|
||||
|
||||
|
||||
// This is a 7-bit address, that gets left-shifted and bit 0
|
||||
// set to 0 for write, 1 for read (as per I2C protocol)
|
||||
// The address will vary depending on your wiring:
|
||||
// 0b0111111 AD <-> VCC
|
||||
// 0b0111110 AD <-> SDA
|
||||
// 0b0111101 AD <-> SCL
|
||||
// 0b0111100 AD <-> GND
|
||||
#ifndef IS31FL3235A_COUNT
|
||||
#define IS31FL3235A_COUNT 1
|
||||
#endif
|
||||
#ifndef IS31FL3235A_DRIVER_ADDR_1
|
||||
#define IS31FL3235A_DRIVER_ADDR_1 0b0111111
|
||||
//#define IS31FL3235A_DRIVER_ADDR_1 0x7E
|
||||
#endif
|
||||
#ifndef IS31FL3235A_DRIVER_ADDR_2
|
||||
#define IS31FL3235A_DRIVER_ADDR_2 0b0111110
|
||||
#endif
|
||||
#ifndef IS31FL3235A_DRIVER_ADDR_3
|
||||
#define IS31FL3235A_DRIVER_ADDR_3 0b0111101
|
||||
#endif
|
||||
#ifndef IS31FL3235A_DRIVER_ADDR_4
|
||||
#define IS31FL3235A_DRIVER_ADDR_4 0b0111100
|
||||
#endif
|
||||
|
||||
// This is the max number of LEDs this driver supports per IC
|
||||
#define IS31FL3235A_LED_MAX 28
|
||||
#ifndef IS31FL3235A_LED_COUNT
|
||||
#define IS31FL3235A_LED_COUNT IS31FL3235A_LED_MAX
|
||||
#endif
|
||||
|
||||
// Registers we will need to write to
|
||||
#define ISSI_REG_SHUTDOWN 0x00 // Control the software shutdown state of the controller
|
||||
#define ISSI_REG_GLOBAL_CONTROL 0x4A // Write 0 for normal operation, 1 to shutdown all LEDs
|
||||
#define ISSI_REG_OUTPUT_FREQ 0x4B // Write 0 for 3kHz PWM, 1 for 22kHz
|
||||
#define ISSI_REG_RESET_REG 0x4F // Write 0 to reset all registers to default value
|
||||
|
||||
|
||||
void IS31FL3235A_init(uint8_t addr);
|
||||
void IS31FL3235A_write_register(uint8_t addr, uint8_t reg, uint8_t data);
|
||||
void IS31FL3235A_write_pwm_buffer(uint8_t addr, uint8_t *pwm_buffer);
|
||||
|
||||
void IS31FL3235A_set_value(int index, uint8_t value);
|
||||
void IS31FL3235A_set_value_all(uint8_t value);
|
||||
|
||||
void IS31FL3235A_set_led_control_register(uint8_t index, bool value);
|
||||
|
||||
// This should not be called from an interrupt
|
||||
// (eg. from a timer interrupt).
|
||||
// Call this while idle (in between matrix scans).
|
||||
// If the buffer is dirty, it will update the driver with the buffer.
|
||||
void IS31FL3235A_update_pwm_buffers(uint8_t addr, uint8_t index);
|
||||
void IS31FL3235A_update_led_control_registers(uint8_t addr, uint8_t index);
|
||||
|
||||
// The address for each LED in the is31fl3235a's Control Register
|
||||
enum control_register {
|
||||
CR_OUT1 = 0x2A,
|
||||
CR_OUT2,
|
||||
CR_OUT3,
|
||||
CR_OUT4,
|
||||
CR_OUT5,
|
||||
CR_OUT6,
|
||||
CR_OUT7,
|
||||
CR_OUT8,
|
||||
CR_OUT9,
|
||||
CR_OUT10,
|
||||
CR_OUT11,
|
||||
CR_OUT12,
|
||||
CR_OUT13,
|
||||
CR_OUT14,
|
||||
CR_OUT15,
|
||||
CR_OUT16,
|
||||
CR_OUT17,
|
||||
CR_OUT18,
|
||||
CR_OUT19,
|
||||
CR_OUT20,
|
||||
CR_OUT21,
|
||||
CR_OUT22,
|
||||
CR_OUT23,
|
||||
CR_OUT24,
|
||||
CR_OUT25,
|
||||
CR_OUT26,
|
||||
CR_OUT27,
|
||||
CR_OUT28
|
||||
};
|
||||
|
||||
// The address for each LED in the is31fl3235a's PWM Register
|
||||
enum pwm_register {
|
||||
OUT1 = 0x05,
|
||||
OUT2,
|
||||
OUT3,
|
||||
OUT4,
|
||||
OUT5,
|
||||
OUT6,
|
||||
OUT7,
|
||||
OUT8,
|
||||
OUT9,
|
||||
OUT10,
|
||||
OUT11,
|
||||
OUT12,
|
||||
OUT13,
|
||||
OUT14,
|
||||
OUT15,
|
||||
OUT16,
|
||||
OUT17,
|
||||
OUT18,
|
||||
OUT19,
|
||||
OUT20,
|
||||
OUT21,
|
||||
OUT22,
|
||||
OUT23,
|
||||
OUT24,
|
||||
OUT25,
|
||||
OUT26,
|
||||
OUT27,
|
||||
OUT28
|
||||
};
|
||||
|
||||
#endif // IS31FL3235A_DRIVER_H
|
||||
@@ -22,10 +22,16 @@ void qwiic_init(void) {
|
||||
#ifdef QWIIC_MICRO_OLED_ENABLE
|
||||
micro_oled_init();
|
||||
#endif
|
||||
#ifdef QWIIC_RGB7SEG_ENABLE
|
||||
rgb7seg_init();
|
||||
#endif
|
||||
}
|
||||
|
||||
void qwiic_task(void) {
|
||||
#ifdef QWIIC_JOYSTIIC_ENABLE
|
||||
joystiic_task();
|
||||
#endif
|
||||
#ifdef QWIIC_RGB7SEG_ENABLE
|
||||
rgb7seg_task();
|
||||
#endif
|
||||
}
|
||||
|
||||
@@ -23,6 +23,9 @@
|
||||
#ifdef QWIIC_MICRO_OLED_ENABLE
|
||||
#include "micro_oled.h"
|
||||
#endif
|
||||
#ifdef QWIIC_RGB7SEG_ENABLE
|
||||
#include "rgb7seg.h"
|
||||
#endif
|
||||
|
||||
void qwiic_init(void);
|
||||
void qwiic_task(void);
|
||||
|
||||
@@ -16,3 +16,9 @@ ifneq ($(filter MICRO_OLED, $(QWIIC_ENABLE)),)
|
||||
OPT_DEFS += -DQWIIC_MICRO_OLED_ENABLE
|
||||
SRC += micro_oled.c
|
||||
endif
|
||||
|
||||
ifneq ($(filter RGB7SEG, $(QWIIC_ENABLE)),)
|
||||
COMMON_VPATH += $(DRIVER_PATH)/issi
|
||||
OPT_DEFS += -DQWIIC_RGB7SEG_ENABLE
|
||||
SRC += rgb7seg.c is31fl3235a.c
|
||||
endif
|
||||
|
||||
@@ -0,0 +1,168 @@
|
||||
/* Copyright 2017 Jason Williams
|
||||
* Copyright 2017 Jack Humbert
|
||||
* Copyright 2018 Yiancar
|
||||
* Copyright 2019 Clueboard
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#include <stdint.h>
|
||||
#include <stdbool.h>
|
||||
#include "quantum.h"
|
||||
#include "rgb7seg.h"
|
||||
#include "is31fl3235a.h"
|
||||
#include "progmem.h"
|
||||
#include "config.h"
|
||||
#include "eeprom.h"
|
||||
#include <string.h>
|
||||
#include <math.h>
|
||||
|
||||
#ifndef MAX
|
||||
#define MAX(X, Y) ((X) > (Y) ? (X) : (Y))
|
||||
#endif
|
||||
|
||||
#ifndef MIN
|
||||
#define MIN(a,b) ((a) < (b)? (a): (b))
|
||||
#endif
|
||||
|
||||
// State variables
|
||||
uint32_t g7_tick = 0; // Global tick at 20 Hz
|
||||
bool rgb7seg_enabled = 0; // Whether or not the display is turned on
|
||||
|
||||
/*
|
||||
const rgb7seg_led g_rgb7seg_leds[IS31FL3235A_COUNT * 8][4] = {
|
||||
/ * Refer to IS31 manual for these locations
|
||||
* driver
|
||||
* | R LED address
|
||||
* | | G LED address
|
||||
* | | | B LED address
|
||||
* | | | | * /
|
||||
{0, OUT17, OUT16, OUT15}, // A, top middle
|
||||
{0, OUT22, OUT21, OUT20}, // B, top right
|
||||
{0, OUT26, OUT27, OUT28}, // C, bottom right
|
||||
{0, OUT1, OUT2, OUT3}, // D, bottom center
|
||||
{0, OUT23, OUT24, OUT25}, // DP, dot
|
||||
{0, OUT4, OUT5, OUT6}, // E, bottom left
|
||||
{0, OUT9, OUT7, OUT8}, // F, top left
|
||||
{0, OUT14, OUT13, OUT12}, // G, center
|
||||
#if IS31FL3235A_COUNT > 1
|
||||
{1, OUT17, OUT16, OUT15}, // A, top middle
|
||||
{1, OUT22, OUT21, OUT20}, // B, top right
|
||||
{1, OUT26, OUT27, OUT28}, // C, bottom right
|
||||
{1, OUT1, OUT2, OUT3}, // D, bottom center
|
||||
{1, OUT23, OUT24, OUT25}, // DP, dot
|
||||
{1, OUT4, OUT5, OUT6}, // E, bottom left
|
||||
{1, OUT9, OUT7, OUT8}, // F, top left
|
||||
{1, OUT14, OUT13, OUT12}, // G, center
|
||||
#endif
|
||||
#if IS31FL3235A_COUNT > 2
|
||||
{2, OUT17, OUT16, OUT15}, // A, top middle
|
||||
{2, OUT17, OUT16, OUT15}, // A, top middle
|
||||
{2, OUT22, OUT21, OUT20}, // B, top right
|
||||
{2, OUT26, OUT27, OUT28}, // C, bottom right
|
||||
{2, OUT1, OUT2, OUT3}, // D, bottom center
|
||||
{2, OUT23, OUT24, OUT25}, // DP, dot
|
||||
{2, OUT4, OUT5, OUT6}, // E, bottom left
|
||||
{2, OUT9, OUT7, OUT8}, // F, top left
|
||||
{2, OUT14, OUT13, OUT12}, // G, center
|
||||
#endif
|
||||
#if IS31FL3235A_COUNT > 3
|
||||
{3, OUT17, OUT16, OUT15}, // A, top middle
|
||||
{3, OUT22, OUT21, OUT20}, // B, top right
|
||||
{3, OUT26, OUT27, OUT28}, // C, bottom right
|
||||
{3, OUT1, OUT2, OUT3}, // D, bottom center
|
||||
{3, OUT23, OUT24, OUT25}, // DP, dot
|
||||
{3, OUT4, OUT5, OUT6}, // E, bottom left
|
||||
{3, OUT9, OUT7, OUT8}, // F, top left
|
||||
{3, OUT14, OUT13, OUT12}, // G, center
|
||||
{3, OUT22, OUT21, OUT20}, // B, top right
|
||||
#endif
|
||||
};
|
||||
*/
|
||||
|
||||
// API
|
||||
void rgb7seg_flush(void) {
|
||||
IS31FL3235A_update_pwm_buffers(IS31FL3235A_DRIVER_ADDR_1, 0);
|
||||
#if IS31FL3235A_COUNT > 1
|
||||
IS31FL3235A_update_pwm_buffers(IS31FL3235A_DRIVER_ADDR_2, 1);
|
||||
#endif
|
||||
#if IS31FL3235A_COUNT > 2
|
||||
IS31FL3235A_update_pwm_buffers(IS31FL3235A_DRIVER_ADDR_3, 2);
|
||||
#endif
|
||||
#if IS31FL3235A_COUNT > 3
|
||||
IS31FL3235A_update_pwm_buffers(IS31FL3235A_DRIVER_ADDR_4, 3);
|
||||
#endif
|
||||
}
|
||||
|
||||
void rgb7seg_set_index_value(int index, uint8_t value) {
|
||||
IS31FL3235A_set_value(index, value);
|
||||
}
|
||||
|
||||
void rgb7seg_set_index_value_all(uint8_t value) {
|
||||
IS31FL3235A_set_value_all(value);
|
||||
}
|
||||
|
||||
// All LEDs off
|
||||
void rgb7seg_off(void) {
|
||||
rgb7seg_set_index_value_all(0);
|
||||
}
|
||||
|
||||
void rgb7seg_task(void) {
|
||||
g7_tick++;
|
||||
|
||||
// Do something here?
|
||||
|
||||
// Tell the LED driver to update its state
|
||||
rgb7seg_flush();
|
||||
}
|
||||
|
||||
void rgb7seg_init(void) {
|
||||
IS31FL3235A_init(IS31FL3235A_DRIVER_ADDR_1);
|
||||
#if IS31FL3235A_COUNT > 1
|
||||
IS31FL3235A_init(IS31FL3235A_DRIVER_ADDR_2);
|
||||
#endif
|
||||
#if IS31FL3235A_COUNT > 2
|
||||
IS31FL3235A_init(IS31FL3235A_DRIVER_ADDR_3);
|
||||
#endif
|
||||
#if IS31FL3235A_COUNT > 3
|
||||
IS31FL3235A_init(IS31FL3235A_DRIVER_ADDR_4);
|
||||
#endif
|
||||
|
||||
// Wait half a second for the driver to finish initializing
|
||||
wait_ms(500);
|
||||
}
|
||||
|
||||
uint32_t rgb7seg_get_tick(void) {
|
||||
return g7_tick;
|
||||
}
|
||||
|
||||
void rgb7seg_toggle(void) {
|
||||
rgb7seg_enabled ^= 1;
|
||||
}
|
||||
|
||||
void rgb7seg_enable(void) {
|
||||
rgb7seg_enabled = 1;
|
||||
}
|
||||
|
||||
void rgb7seg_disable(void) {
|
||||
rgb7seg_enabled = 0;
|
||||
}
|
||||
|
||||
void rgb7seg_increase_val(void) {
|
||||
// FIXME: Implement
|
||||
}
|
||||
|
||||
void rgb7seg_decrease_val(void) {
|
||||
// FIXME: Implement
|
||||
}
|
||||
@@ -0,0 +1,60 @@
|
||||
/* Copyright 2017 Jason Williams
|
||||
* Copyright 2017 Jack Humbert
|
||||
* Copyright 2018 Yiancar
|
||||
* Copyright 2019 Clueboard
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#ifndef LED_MATRIX_H
|
||||
#define LED_MATRIX_H
|
||||
|
||||
#include "is31fl3235a.h"
|
||||
|
||||
#ifndef BACKLIGHT_ENABLE
|
||||
#error You must define BACKLIGHT_ENABLE with LED_MATRIX_ENABLE
|
||||
#endif
|
||||
|
||||
|
||||
void rgb7seg_task(void);
|
||||
void rgb7seg_init(void);
|
||||
|
||||
// This should not be called from an interrupt
|
||||
// (eg. from a timer interrupt).
|
||||
// Call this while idle (in between matrix scans).
|
||||
// If the buffer is dirty, it will update the driver with the buffer.
|
||||
void rgb7seg_flush(void);
|
||||
|
||||
uint32_t rgb7seg_get_tick(void);
|
||||
|
||||
void rgb7seg_off(void);
|
||||
void rgb7seg_set_index_value(int index, uint8_t value);
|
||||
void rgb7seg_set_index_value_all(uint8_t value);
|
||||
|
||||
void rgb7seg_toggle(void);
|
||||
void rgb7seg_enable(void);
|
||||
void rgb7seg_disable(void);
|
||||
void rgb7seg_increase_val(void);
|
||||
void rgb7seg_decrease_val(void);
|
||||
|
||||
typedef struct rgb7seg_led {
|
||||
uint8_t driver;
|
||||
uint8_t r;
|
||||
uint8_t g;
|
||||
uint8_t b;
|
||||
} __attribute__((packed)) rgb7seg_led;
|
||||
|
||||
extern const rgb7seg_led g_rgb7seg_leds[IS31FL3235A_COUNT * 8];
|
||||
|
||||
#endif
|
||||
@@ -1,15 +1,15 @@
|
||||
# 412-64
|
||||
|
||||

|
||||

|
||||
|
||||
A compact 60% keyboard designed by Fate Everywhere and sold on a limited basis. Born out of the desire for a Planck with a numpad for technical work.
|
||||
|
||||
Keyboard Maintainer: [Fate Everywhere](https://github.com/fateeverywhere)
|
||||
Hardware Supported: 4x16 T&E Prototype, Mark Zero Stand Aside.
|
||||
Hardware Availability: No longer available, was a tester for Stand Aside. Build definitions are in handwired because two units are in the wild.
|
||||
Hardware Supported: 4x16 T&E Prototype, 412-64 Mk. 0, Mk. 1.
|
||||
Hardware Availability: Highly limited, contact /u/FateEverywhere on reddit for availability.
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
make handwired/412_64:default
|
||||
make 412-64:default
|
||||
|
||||
See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs).
|
||||
@@ -1,249 +0,0 @@
|
||||
/*
|
||||
Copyright 2018 Ryota Goto
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#pragma once
|
||||
|
||||
#include "config_common.h"
|
||||
|
||||
/* USB Device descriptor parameter */
|
||||
#define VENDOR_ID 0xA103
|
||||
#define PRODUCT_ID 0x0003
|
||||
#define DEVICE_VER 0x0003
|
||||
#define MANUFACTURER ai03 Keyboard Designs
|
||||
#define PRODUCT Orbit
|
||||
#define DESCRIPTION Split ergonomic keyboard
|
||||
|
||||
/* key matrix size */
|
||||
#define MATRIX_ROWS 10 // Double rows for split keyboards. Orbit has 5, so define 10
|
||||
#define MATRIX_COLS 7
|
||||
|
||||
/*
|
||||
* Keyboard Matrix Assignments
|
||||
*
|
||||
* Change this to how you wired your keyboard
|
||||
* COLS: AVR pins used for columns, left to right
|
||||
* ROWS: AVR pins used for rows, top to bottom
|
||||
* DIODE_DIRECTION: COL2ROW = COL = Anode (+), ROW = Cathode (-, marked on diode)
|
||||
* ROW2COL = ROW = Anode (+), COL = Cathode (-, marked on diode)
|
||||
*
|
||||
*/
|
||||
#define MATRIX_ROW_PINS { F7, F6, F5, F4, D3 }
|
||||
#define MATRIX_COL_PINS { C7, B4, D7, D6, D4, F1, F0 }
|
||||
#define MATRIX_ROW_PINS_RIGHT { B6, B5, B4, D7, E6 }
|
||||
#define MATRIX_COL_PINS_RIGHT { D4, D6, F1, F0, F4, F5, C6 }
|
||||
|
||||
#define SPLIT_HAND_PIN D5
|
||||
|
||||
//#define USE_I2C
|
||||
|
||||
#define SELECT_SOFT_SERIAL_SPEED 1
|
||||
|
||||
#define UNUSED_PINS
|
||||
|
||||
/* COL2ROW, ROW2COL, or CUSTOM_MATRIX */
|
||||
#define DIODE_DIRECTION COL2ROW
|
||||
|
||||
/*
|
||||
* Split Keyboard specific options, make sure you have 'SPLIT_KEYBOARD = yes' in your rules.mk, and define SOFT_SERIAL_PIN.
|
||||
*/
|
||||
#define SOFT_SERIAL_PIN D0 // or D1, D2, D3, E6
|
||||
|
||||
#define BACKLIGHT_PIN B7
|
||||
// #define BACKLIGHT_BREATHING
|
||||
#define BACKLIGHT_LEVELS 3
|
||||
|
||||
// #define RGB_DI_PIN E2
|
||||
// #ifdef RGB_DI_PIN
|
||||
// #define RGBLED_NUM 16
|
||||
// #define RGBLIGHT_HUE_STEP 8
|
||||
// #define RGBLIGHT_SAT_STEP 8
|
||||
// #define RGBLIGHT_VAL_STEP 8
|
||||
// #define RGBLIGHT_LIMIT_VAL 255 /* The maximum brightness level */
|
||||
// #define RGBLIGHT_SLEEP /* If defined, the RGB lighting will be switched off when the host goes to sleep */
|
||||
// /*== all animations enable ==*/
|
||||
// #define RGBLIGHT_ANIMATIONS
|
||||
// /*== or choose animations ==*/
|
||||
// #define RGBLIGHT_EFFECT_BREATHING
|
||||
// #define RGBLIGHT_EFFECT_RAINBOW_MOOD
|
||||
// #define RGBLIGHT_EFFECT_RAINBOW_SWIRL
|
||||
// #define RGBLIGHT_EFFECT_SNAKE
|
||||
// #define RGBLIGHT_EFFECT_KNIGHT
|
||||
// #define RGBLIGHT_EFFECT_CHRISTMAS
|
||||
// #define RGBLIGHT_EFFECT_STATIC_GRADIENT
|
||||
// #define RGBLIGHT_EFFECT_RGB_TEST
|
||||
// #define RGBLIGHT_EFFECT_ALTERNATING
|
||||
// #endif
|
||||
|
||||
/* Debounce reduces chatter (unintended double-presses) - set 0 if debouncing is not needed */
|
||||
#define DEBOUNCING_DELAY 5
|
||||
|
||||
/* define if matrix has ghost (lacks anti-ghosting diodes) */
|
||||
//#define MATRIX_HAS_GHOST
|
||||
|
||||
/* number of backlight levels */
|
||||
|
||||
/* Mechanical locking support. Use KC_LCAP, KC_LNUM or KC_LSCR instead in keymap */
|
||||
#define LOCKING_SUPPORT_ENABLE
|
||||
/* Locking resynchronize hack */
|
||||
#define LOCKING_RESYNC_ENABLE
|
||||
|
||||
/* If defined, GRAVE_ESC will always act as ESC when CTRL is held.
|
||||
* This is userful for the Windows task manager shortcut (ctrl+shift+esc).
|
||||
*/
|
||||
// #define GRAVE_ESC_CTRL_OVERRIDE
|
||||
|
||||
/*
|
||||
* Force NKRO
|
||||
*
|
||||
* Force NKRO (nKey Rollover) to be enabled by default, regardless of the saved
|
||||
* state in the bootmagic EEPROM settings. (Note that NKRO must be enabled in the
|
||||
* makefile for this to work.)
|
||||
*
|
||||
* If forced on, NKRO can be disabled via magic key (default = LShift+RShift+N)
|
||||
* until the next keyboard reset.
|
||||
*
|
||||
* NKRO may prevent your keystrokes from being detected in the BIOS, but it is
|
||||
* fully operational during normal computer usage.
|
||||
*
|
||||
* For a less heavy-handed approach, enable NKRO via magic key (LShift+RShift+N)
|
||||
* or via bootmagic (hold SPACE+N while plugging in the keyboard). Once set by
|
||||
* bootmagic, NKRO mode will always be enabled until it is toggled again during a
|
||||
* power-up.
|
||||
*
|
||||
*/
|
||||
//#define FORCE_NKRO
|
||||
|
||||
/*
|
||||
* Magic Key Options
|
||||
*
|
||||
* Magic keys are hotkey commands that allow control over firmware functions of
|
||||
* the keyboard. They are best used in combination with the HID Listen program,
|
||||
* found here: https://www.pjrc.com/teensy/hid_listen.html
|
||||
*
|
||||
* The options below allow the magic key functionality to be changed. This is
|
||||
* useful if your keyboard/keypad is missing keys and you want magic key support.
|
||||
*
|
||||
*/
|
||||
|
||||
/* control how magic key switches layers */
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_FKEYS true
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_NKEYS true
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_CUSTOM false
|
||||
|
||||
/* override magic key keymap */
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_FKEYS
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_NKEYS
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_CUSTOM
|
||||
//#define MAGIC_KEY_HELP1 H
|
||||
//#define MAGIC_KEY_HELP2 SLASH
|
||||
//#define MAGIC_KEY_DEBUG D
|
||||
//#define MAGIC_KEY_DEBUG_MATRIX X
|
||||
//#define MAGIC_KEY_DEBUG_KBD K
|
||||
//#define MAGIC_KEY_DEBUG_MOUSE M
|
||||
//#define MAGIC_KEY_VERSION V
|
||||
//#define MAGIC_KEY_STATUS S
|
||||
//#define MAGIC_KEY_CONSOLE C
|
||||
//#define MAGIC_KEY_LAYER0_ALT1 ESC
|
||||
//#define MAGIC_KEY_LAYER0_ALT2 GRAVE
|
||||
//#define MAGIC_KEY_LAYER0 0
|
||||
//#define MAGIC_KEY_LAYER1 1
|
||||
//#define MAGIC_KEY_LAYER2 2
|
||||
//#define MAGIC_KEY_LAYER3 3
|
||||
//#define MAGIC_KEY_LAYER4 4
|
||||
//#define MAGIC_KEY_LAYER5 5
|
||||
//#define MAGIC_KEY_LAYER6 6
|
||||
//#define MAGIC_KEY_LAYER7 7
|
||||
//#define MAGIC_KEY_LAYER8 8
|
||||
//#define MAGIC_KEY_LAYER9 9
|
||||
//#define MAGIC_KEY_BOOTLOADER PAUSE
|
||||
//#define MAGIC_KEY_LOCK CAPS
|
||||
//#define MAGIC_KEY_EEPROM E
|
||||
//#define MAGIC_KEY_NKRO N
|
||||
//#define MAGIC_KEY_SLEEP_LED Z
|
||||
|
||||
/*
|
||||
* Feature disable options
|
||||
* These options are also useful to firmware size reduction.
|
||||
*/
|
||||
|
||||
/* disable debug print */
|
||||
//#define NO_DEBUG
|
||||
|
||||
/* disable print */
|
||||
//#define NO_PRINT
|
||||
|
||||
/* disable action features */
|
||||
//#define NO_ACTION_LAYER
|
||||
//#define NO_ACTION_TAPPING
|
||||
//#define NO_ACTION_ONESHOT
|
||||
//#define NO_ACTION_MACRO
|
||||
//#define NO_ACTION_FUNCTION
|
||||
|
||||
/*
|
||||
* MIDI options
|
||||
*/
|
||||
|
||||
/* Prevent use of disabled MIDI features in the keymap */
|
||||
//#define MIDI_ENABLE_STRICT 1
|
||||
|
||||
/* enable basic MIDI features:
|
||||
- MIDI notes can be sent when in Music mode is on
|
||||
*/
|
||||
//#define MIDI_BASIC
|
||||
|
||||
/* enable advanced MIDI features:
|
||||
- MIDI notes can be added to the keymap
|
||||
- Octave shift and transpose
|
||||
- Virtual sustain, portamento, and modulation wheel
|
||||
- etc.
|
||||
*/
|
||||
//#define MIDI_ADVANCED
|
||||
|
||||
/* override number of MIDI tone keycodes (each octave adds 12 keycodes and allocates 12 bytes) */
|
||||
//#define MIDI_TONE_KEYCODE_OCTAVES 1
|
||||
|
||||
/*
|
||||
* HD44780 LCD Display Configuration
|
||||
*/
|
||||
/*
|
||||
#define LCD_LINES 2 //< number of visible lines of the display
|
||||
#define LCD_DISP_LENGTH 16 //< visibles characters per line of the display
|
||||
|
||||
#define LCD_IO_MODE 1 //< 0: memory mapped mode, 1: IO port mode
|
||||
|
||||
#if LCD_IO_MODE
|
||||
#define LCD_PORT PORTB //< port for the LCD lines
|
||||
#define LCD_DATA0_PORT LCD_PORT //< port for 4bit data bit 0
|
||||
#define LCD_DATA1_PORT LCD_PORT //< port for 4bit data bit 1
|
||||
#define LCD_DATA2_PORT LCD_PORT //< port for 4bit data bit 2
|
||||
#define LCD_DATA3_PORT LCD_PORT //< port for 4bit data bit 3
|
||||
#define LCD_DATA0_PIN 4 //< pin for 4bit data bit 0
|
||||
#define LCD_DATA1_PIN 5 //< pin for 4bit data bit 1
|
||||
#define LCD_DATA2_PIN 6 //< pin for 4bit data bit 2
|
||||
#define LCD_DATA3_PIN 7 //< pin for 4bit data bit 3
|
||||
#define LCD_RS_PORT LCD_PORT //< port for RS line
|
||||
#define LCD_RS_PIN 3 //< pin for RS line
|
||||
#define LCD_RW_PORT LCD_PORT //< port for RW line
|
||||
#define LCD_RW_PIN 2 //< pin for RW line
|
||||
#define LCD_E_PORT LCD_PORT //< port for Enable line
|
||||
#define LCD_E_PIN 1 //< pin for Enable line
|
||||
#endif
|
||||
*/
|
||||
|
||||
/* Bootmagic Lite key configuration */
|
||||
// #define BOOTMAGIC_LITE_ROW 0
|
||||
// #define BOOTMAGIC_LITE_COLUMN 0
|
||||
@@ -1,91 +0,0 @@
|
||||
/* Copyright 2018 Ryota Goto
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
// Defines the keycodes used by our macros in process_record_user
|
||||
enum custom_keycodes {
|
||||
MANUAL = SAFE_RANGE,
|
||||
DBLZERO
|
||||
};
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[0] = LAYOUT( /* Base */
|
||||
TO(1), KC_ESC, KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_LBRC, KC_BSPC, \
|
||||
TO(1), KC_TAB, KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, KC_RBRC, KC_BSLS, \
|
||||
KC_NO, KC_CAPS, KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT, KC_ENT, \
|
||||
KC_NO, KC_LSFT, KC_Z, KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, KC_SLSH, KC_PSCR, KC_DEL, \
|
||||
KC_LCTL, KC_LCTL, KC_LGUI, KC_LALT, MO(1), KC_SPC, KC_SPC, MO(2), KC_GRV, KC_MENU, KC_MINS, KC_EQL
|
||||
),
|
||||
[1] = LAYOUT( /* Fn, Arrowkeys, Media control, Backlight */
|
||||
TO(2), _______, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_VOLU, _______, \
|
||||
TO(2), _______, _______, KC_PGUP, _______, _______, KC_F11, KC_F12, _______, KC_UP, _______, _______, KC_VOLD, BL_STEP, \
|
||||
TO(0), _______, KC_HOME, KC_PGDN, KC_END, _______, _______, _______, KC_LEFT, KC_DOWN, KC_RGHT, _______, KC_MPLY, _______, \
|
||||
TO(0), _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, KC_INS, \
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______
|
||||
),
|
||||
[2] = LAYOUT( /* Mousekeys and Numpad */
|
||||
KC_NO, _______, _______, _______, _______, _______, _______, KC_NLCK, KC_P7, KC_P8, KC_P9, KC_PSLS, _______, _______, \
|
||||
KC_NO, _______, KC_BTN1, KC_MS_U, KC_BTN2, KC_WH_U, _______, _______, KC_P4, KC_P5, KC_P6, KC_PAST, _______, _______, \
|
||||
TO(1), _______, KC_MS_L, KC_MS_D, KC_MS_R, KC_WH_D, _______, _______, KC_P1, KC_P2, KC_P3, KC_PMNS, _______, _______, \
|
||||
TO(1), _______, KC_ACL0, KC_ACL1, KC_ACL2, KC_BTN3, _______, DBLZERO, KC_P0, KC_PDOT, KC_PENT, KC_PPLS, _______, MANUAL, \
|
||||
_______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______, _______
|
||||
)
|
||||
};
|
||||
|
||||
bool process_record_user(uint16_t keycode, keyrecord_t *record) {
|
||||
switch (keycode) {
|
||||
case MANUAL:
|
||||
if (record->event.pressed)
|
||||
{
|
||||
// Keypress
|
||||
SEND_STRING("https://kb.ai03.me/redir/orbit");
|
||||
}
|
||||
else
|
||||
{
|
||||
// Key release
|
||||
}
|
||||
break;
|
||||
case DBLZERO:
|
||||
if (record->event.pressed)
|
||||
{
|
||||
// Keypress
|
||||
SEND_STRING("00");
|
||||
}
|
||||
else
|
||||
{
|
||||
// Key release
|
||||
}
|
||||
break;
|
||||
}
|
||||
return true;
|
||||
}
|
||||
|
||||
void matrix_init_user(void) {
|
||||
|
||||
}
|
||||
|
||||
void matrix_scan_user(void) {
|
||||
|
||||
}
|
||||
|
||||
void led_set_user(uint8_t usb_led) {
|
||||
|
||||
}
|
||||
|
||||
uint32_t layer_state_set_user(uint32_t state) {
|
||||
|
||||
return state;
|
||||
}
|
||||
@@ -1,3 +0,0 @@
|
||||
# The default keymap for Orbit
|
||||
|
||||
[KLE of layout](http://www.keyboard-layout-editor.com/#/gists/53ebf59524de12515cb7e2e6de94f0d6)
|
||||
@@ -1,328 +0,0 @@
|
||||
/*
|
||||
Copyright 2012 Jun Wako <wakojun@gmail.com>
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
/*
|
||||
* scan matrix
|
||||
*/
|
||||
#include <stdint.h>
|
||||
#include <stdbool.h>
|
||||
#include "wait.h"
|
||||
#include "util.h"
|
||||
#include "matrix.h"
|
||||
#include "split_util.h"
|
||||
#include "config.h"
|
||||
#include "split_flags.h"
|
||||
#include "quantum.h"
|
||||
#include "debounce.h"
|
||||
#include "transport.h"
|
||||
|
||||
#if (MATRIX_COLS <= 8)
|
||||
# define print_matrix_header() print("\nr/c 01234567\n")
|
||||
# define print_matrix_row(row) print_bin_reverse8(matrix_get_row(row))
|
||||
# define matrix_bitpop(i) bitpop(matrix[i])
|
||||
# define ROW_SHIFTER ((uint8_t)1)
|
||||
#elif (MATRIX_COLS <= 16)
|
||||
# define print_matrix_header() print("\nr/c 0123456789ABCDEF\n")
|
||||
# define print_matrix_row(row) print_bin_reverse16(matrix_get_row(row))
|
||||
# define matrix_bitpop(i) bitpop16(matrix[i])
|
||||
# define ROW_SHIFTER ((uint16_t)1)
|
||||
#elif (MATRIX_COLS <= 32)
|
||||
# define print_matrix_header() print("\nr/c 0123456789ABCDEF0123456789ABCDEF\n")
|
||||
# define print_matrix_row(row) print_bin_reverse32(matrix_get_row(row))
|
||||
# define matrix_bitpop(i) bitpop32(matrix[i])
|
||||
# define ROW_SHIFTER ((uint32_t)1)
|
||||
#endif
|
||||
|
||||
#define ERROR_DISCONNECT_COUNT 5
|
||||
|
||||
//#define ROWS_PER_HAND (MATRIX_ROWS / 2)
|
||||
|
||||
#ifdef DIRECT_PINS
|
||||
static pin_t direct_pins[MATRIX_ROWS][MATRIX_COLS] = DIRECT_PINS;
|
||||
#else
|
||||
static pin_t row_pins[MATRIX_ROWS] = MATRIX_ROW_PINS;
|
||||
static pin_t col_pins[MATRIX_COLS] = MATRIX_COL_PINS;
|
||||
#endif
|
||||
|
||||
/* matrix state(1:on, 0:off) */
|
||||
static matrix_row_t matrix[MATRIX_ROWS];
|
||||
static matrix_row_t raw_matrix[ROWS_PER_HAND];
|
||||
|
||||
// row offsets for each hand
|
||||
uint8_t thisHand, thatHand;
|
||||
|
||||
// user-defined overridable functions
|
||||
|
||||
__attribute__((weak)) void matrix_init_kb(void) { matrix_init_user(); }
|
||||
|
||||
__attribute__((weak)) void matrix_scan_kb(void) { matrix_scan_user(); }
|
||||
|
||||
__attribute__((weak)) void matrix_init_user(void) {}
|
||||
|
||||
__attribute__((weak)) void matrix_scan_user(void) {}
|
||||
|
||||
__attribute__((weak)) void matrix_slave_scan_user(void) {}
|
||||
|
||||
// helper functions
|
||||
|
||||
inline uint8_t matrix_rows(void) { return MATRIX_ROWS; }
|
||||
|
||||
inline uint8_t matrix_cols(void) { return MATRIX_COLS; }
|
||||
|
||||
bool matrix_is_modified(void) {
|
||||
if (debounce_active()) return false;
|
||||
return true;
|
||||
}
|
||||
|
||||
inline bool matrix_is_on(uint8_t row, uint8_t col) { return (matrix[row] & ((matrix_row_t)1 << col)); }
|
||||
|
||||
inline matrix_row_t matrix_get_row(uint8_t row) { return matrix[row]; }
|
||||
|
||||
void matrix_print(void) {
|
||||
print_matrix_header();
|
||||
|
||||
for (uint8_t row = 0; row < MATRIX_ROWS; row++) {
|
||||
phex(row);
|
||||
print(": ");
|
||||
print_matrix_row(row);
|
||||
print("\n");
|
||||
}
|
||||
}
|
||||
|
||||
uint8_t matrix_key_count(void) {
|
||||
uint8_t count = 0;
|
||||
for (uint8_t i = 0; i < MATRIX_ROWS; i++) {
|
||||
count += matrix_bitpop(i);
|
||||
}
|
||||
return count;
|
||||
}
|
||||
|
||||
// matrix code
|
||||
|
||||
#ifdef DIRECT_PINS
|
||||
|
||||
static void init_pins(void) {
|
||||
for (int row = 0; row < MATRIX_ROWS; row++) {
|
||||
for (int col = 0; col < MATRIX_COLS; col++) {
|
||||
pin_t pin = direct_pins[row][col];
|
||||
if (pin != NO_PIN) {
|
||||
setPinInputHigh(pin);
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
static bool read_cols_on_row(matrix_row_t current_matrix[], uint8_t current_row) {
|
||||
matrix_row_t last_row_value = current_matrix[current_row];
|
||||
current_matrix[current_row] = 0;
|
||||
|
||||
for (uint8_t col_index = 0; col_index < MATRIX_COLS; col_index++) {
|
||||
pin_t pin = direct_pins[current_row][col_index];
|
||||
if (pin != NO_PIN) {
|
||||
current_matrix[current_row] |= readPin(pin) ? 0 : (ROW_SHIFTER << col_index);
|
||||
}
|
||||
}
|
||||
|
||||
return (last_row_value != current_matrix[current_row]);
|
||||
}
|
||||
|
||||
#elif (DIODE_DIRECTION == COL2ROW)
|
||||
|
||||
static void select_row(uint8_t row) {
|
||||
setPinOutput(row_pins[row]);
|
||||
writePinLow(row_pins[row]);
|
||||
}
|
||||
|
||||
static void unselect_row(uint8_t row) { setPinInputHigh(row_pins[row]); }
|
||||
|
||||
static void unselect_rows(void) {
|
||||
for (uint8_t x = 0; x < ROWS_PER_HAND; x++) {
|
||||
setPinInputHigh(row_pins[x]);
|
||||
}
|
||||
}
|
||||
|
||||
static void init_pins(void) {
|
||||
unselect_rows();
|
||||
for (uint8_t x = 0; x < MATRIX_COLS; x++) {
|
||||
setPinInputHigh(col_pins[x]);
|
||||
}
|
||||
}
|
||||
|
||||
static bool read_cols_on_row(matrix_row_t current_matrix[], uint8_t current_row) {
|
||||
// Store last value of row prior to reading
|
||||
matrix_row_t last_row_value = current_matrix[current_row];
|
||||
|
||||
// Clear data in matrix row
|
||||
current_matrix[current_row] = 0;
|
||||
|
||||
// Select row and wait for row selecton to stabilize
|
||||
select_row(current_row);
|
||||
wait_us(30);
|
||||
|
||||
// For each col...
|
||||
for (uint8_t col_index = 0; col_index < MATRIX_COLS; col_index++) {
|
||||
// Populate the matrix row with the state of the col pin
|
||||
current_matrix[current_row] |= readPin(col_pins[col_index]) ? 0 : (ROW_SHIFTER << col_index);
|
||||
}
|
||||
|
||||
// Unselect row
|
||||
unselect_row(current_row);
|
||||
|
||||
return (last_row_value != current_matrix[current_row]);
|
||||
}
|
||||
|
||||
#elif (DIODE_DIRECTION == ROW2COL)
|
||||
|
||||
static void select_col(uint8_t col) {
|
||||
setPinOutput(col_pins[col]);
|
||||
writePinLow(col_pins[col]);
|
||||
}
|
||||
|
||||
static void unselect_col(uint8_t col) { setPinInputHigh(col_pins[col]); }
|
||||
|
||||
static void unselect_cols(void) {
|
||||
for (uint8_t x = 0; x < MATRIX_COLS; x++) {
|
||||
setPinInputHigh(col_pins[x]);
|
||||
}
|
||||
}
|
||||
|
||||
static void init_pins(void) {
|
||||
unselect_cols();
|
||||
for (uint8_t x = 0; x < ROWS_PER_HAND; x++) {
|
||||
setPinInputHigh(row_pins[x]);
|
||||
}
|
||||
}
|
||||
|
||||
static bool read_rows_on_col(matrix_row_t current_matrix[], uint8_t current_col) {
|
||||
bool matrix_changed = false;
|
||||
|
||||
// Select col and wait for col selecton to stabilize
|
||||
select_col(current_col);
|
||||
wait_us(30);
|
||||
|
||||
// For each row...
|
||||
for (uint8_t row_index = 0; row_index < ROWS_PER_HAND; row_index++) {
|
||||
// Store last value of row prior to reading
|
||||
matrix_row_t last_row_value = current_matrix[row_index];
|
||||
|
||||
// Check row pin state
|
||||
if (readPin(row_pins[row_index])) {
|
||||
// Pin HI, clear col bit
|
||||
current_matrix[row_index] &= ~(ROW_SHIFTER << current_col);
|
||||
} else {
|
||||
// Pin LO, set col bit
|
||||
current_matrix[row_index] |= (ROW_SHIFTER << current_col);
|
||||
}
|
||||
|
||||
// Determine if the matrix changed state
|
||||
if ((last_row_value != current_matrix[row_index]) && !(matrix_changed)) {
|
||||
matrix_changed = true;
|
||||
}
|
||||
}
|
||||
|
||||
// Unselect col
|
||||
unselect_col(current_col);
|
||||
|
||||
return matrix_changed;
|
||||
}
|
||||
|
||||
#endif
|
||||
|
||||
void matrix_init(void) {
|
||||
debug_enable = true;
|
||||
debug_matrix = true;
|
||||
debug_mouse = true;
|
||||
|
||||
// Set pinout for right half if pinout for that half is defined
|
||||
if (!isLeftHand) {
|
||||
#ifdef MATRIX_ROW_PINS_RIGHT
|
||||
const uint8_t row_pins_right[MATRIX_ROWS] = MATRIX_ROW_PINS_RIGHT;
|
||||
for (uint8_t i = 0; i < MATRIX_ROWS; i++) {
|
||||
row_pins[i] = row_pins_right[i];
|
||||
}
|
||||
#endif
|
||||
#ifdef MATRIX_COL_PINS_RIGHT
|
||||
const uint8_t col_pins_right[MATRIX_COLS] = MATRIX_COL_PINS_RIGHT;
|
||||
for (uint8_t i = 0; i < MATRIX_COLS; i++) {
|
||||
col_pins[i] = col_pins_right[i];
|
||||
}
|
||||
#endif
|
||||
}
|
||||
|
||||
thisHand = isLeftHand ? 0 : (ROWS_PER_HAND);
|
||||
thatHand = ROWS_PER_HAND - thisHand;
|
||||
|
||||
// initialize key pins
|
||||
init_pins();
|
||||
|
||||
// initialize matrix state: all keys off
|
||||
for (uint8_t i = 0; i < MATRIX_ROWS; i++) {
|
||||
matrix[i] = 0;
|
||||
}
|
||||
|
||||
debounce_init(ROWS_PER_HAND);
|
||||
|
||||
matrix_init_quantum();
|
||||
}
|
||||
|
||||
uint8_t _matrix_scan(void) {
|
||||
bool changed = false;
|
||||
|
||||
#if defined(DIRECT_PINS) || (DIODE_DIRECTION == COL2ROW)
|
||||
// Set row, read cols
|
||||
for (uint8_t current_row = 0; current_row < ROWS_PER_HAND; current_row++) {
|
||||
changed |= read_cols_on_row(raw_matrix, current_row);
|
||||
}
|
||||
#elif (DIODE_DIRECTION == ROW2COL)
|
||||
// Set col, read rows
|
||||
for (uint8_t current_col = 0; current_col < MATRIX_COLS; current_col++) {
|
||||
changed |= read_rows_on_col(raw_matrix, current_col);
|
||||
}
|
||||
#endif
|
||||
|
||||
debounce(raw_matrix, matrix + thisHand, ROWS_PER_HAND, changed);
|
||||
|
||||
return 1;
|
||||
}
|
||||
|
||||
uint8_t matrix_scan(void) {
|
||||
uint8_t ret = _matrix_scan();
|
||||
|
||||
if (is_keyboard_master()) {
|
||||
static uint8_t error_count;
|
||||
|
||||
if (!transport_master(matrix + thatHand)) {
|
||||
error_count++;
|
||||
|
||||
if (error_count > ERROR_DISCONNECT_COUNT) {
|
||||
// reset other half if disconnected
|
||||
for (int i = 0; i < ROWS_PER_HAND; ++i) {
|
||||
matrix[thatHand + i] = 0;
|
||||
}
|
||||
}
|
||||
} else {
|
||||
error_count = 0;
|
||||
}
|
||||
|
||||
matrix_scan_quantum();
|
||||
} else {
|
||||
transport_slave(matrix + thisHand);
|
||||
matrix_slave_scan_user();
|
||||
}
|
||||
|
||||
return ret;
|
||||
}
|
||||
@@ -1,3 +0,0 @@
|
||||
#pragma once
|
||||
|
||||
#include <common/matrix.h>
|
||||
@@ -1,228 +0,0 @@
|
||||
/* Copyright 2018 Ryota Goto
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include "orbit.h"
|
||||
#include "split_util.h"
|
||||
#include "transport.h"
|
||||
|
||||
|
||||
// Call led_toggle to set LEDs easily
|
||||
// LED IDs:
|
||||
//
|
||||
// (LEFT) 0 1 2 | 3 4 5 (RIGHT)
|
||||
|
||||
void led_toggle(int id, bool on) {
|
||||
|
||||
if (isLeftHand) {
|
||||
switch(id) {
|
||||
case 0:
|
||||
// Left hand C6
|
||||
if (on)
|
||||
//PORTC |= (1<<6);
|
||||
writePinHigh(C6);
|
||||
else
|
||||
//PORTC &= ~(1<<6);
|
||||
writePinLow(C6);
|
||||
break;
|
||||
case 1:
|
||||
// Left hand B6
|
||||
if (on)
|
||||
//PORTB |= (1<<6);
|
||||
writePinHigh(B6);
|
||||
else
|
||||
//PORTB &= ~(1<<6);
|
||||
writePinLow(B6);
|
||||
break;
|
||||
case 2:
|
||||
// Left hand B5
|
||||
if (on)
|
||||
//PORTB |= (1<<5);
|
||||
writePinHigh(B5);
|
||||
else
|
||||
//PORTB &= ~(1<<5);
|
||||
writePinLow(B5);
|
||||
break;
|
||||
default:
|
||||
break;
|
||||
}
|
||||
} else {
|
||||
switch(id) {
|
||||
case 3:
|
||||
// Right hand F6
|
||||
if (on)
|
||||
//PORTF |= (1<<6);
|
||||
writePinHigh(F6);
|
||||
else
|
||||
//PORTF &= ~(1<<6);
|
||||
writePinLow(F6);
|
||||
break;
|
||||
case 4:
|
||||
// Right hand F7
|
||||
if (on)
|
||||
//PORTF |= (1<<7);
|
||||
writePinHigh(F7);
|
||||
else
|
||||
//PORTF &= ~(1<<7);
|
||||
writePinLow(F7);
|
||||
break;
|
||||
case 5:
|
||||
// Right hand C7
|
||||
if (on)
|
||||
//PORTC |= (1<<7);
|
||||
writePinHigh(C7);
|
||||
else
|
||||
//PORTC &= ~(1<<7);
|
||||
writePinLow(C7);
|
||||
break;
|
||||
default:
|
||||
break;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
// Set all LEDs at once using an array of 6 booleans
|
||||
// LED IDs:
|
||||
//
|
||||
// (LEFT) 0 1 2 | 3 4 5 (RIGHT)
|
||||
//
|
||||
// Ex. set_all_leds({ false, false, false, true, true, true }) would turn off left hand, turn on right hand
|
||||
|
||||
void set_all_leds(bool leds[6]) {
|
||||
for (int i = 0; i < 6; i++) {
|
||||
led_toggle(i, leds[i]);
|
||||
}
|
||||
}
|
||||
|
||||
void set_layer_indicators(uint8_t layer) {
|
||||
|
||||
switch (layer)
|
||||
{
|
||||
case 0:
|
||||
led_toggle(0, true);
|
||||
led_toggle(1, false);
|
||||
led_toggle(2, false);
|
||||
break;
|
||||
case 1:
|
||||
led_toggle(0, true);
|
||||
led_toggle(1, true);
|
||||
led_toggle(2, false);
|
||||
break;
|
||||
case 2:
|
||||
led_toggle(0, true);
|
||||
led_toggle(1, true);
|
||||
led_toggle(2, true);
|
||||
break;
|
||||
case 3:
|
||||
led_toggle(0, false);
|
||||
led_toggle(1, true);
|
||||
led_toggle(2, true);
|
||||
break;
|
||||
case 4:
|
||||
led_toggle(0, false);
|
||||
led_toggle(1, false);
|
||||
led_toggle(2, true);
|
||||
break;
|
||||
default:
|
||||
led_toggle(0, true);
|
||||
led_toggle(1, false);
|
||||
led_toggle(2, true);
|
||||
break;
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
void matrix_init_kb(void) {
|
||||
// put your keyboard start-up code here
|
||||
// runs once when the firmware starts up
|
||||
|
||||
// Initialize indicator LEDs to output
|
||||
if (isLeftHand)
|
||||
{
|
||||
setPinOutput(C6);
|
||||
setPinOutput(B6);
|
||||
setPinOutput(B5);
|
||||
//DDRC |= (1<<6);
|
||||
//DDRB |= (1<<6);
|
||||
//DDRB |= (1<<5);
|
||||
}
|
||||
else
|
||||
{
|
||||
setPinOutput(F6);
|
||||
setPinOutput(F7);
|
||||
setPinOutput(C7);
|
||||
//DDRF |= (1<<6);
|
||||
//DDRF |= (1<<7);
|
||||
//DDRC |= (1<<7);
|
||||
}
|
||||
|
||||
set_layer_indicators(0);
|
||||
|
||||
matrix_init_user();
|
||||
}
|
||||
|
||||
void matrix_scan_kb(void) {
|
||||
// put your looping keyboard code here
|
||||
// runs every cycle (a lot)
|
||||
|
||||
matrix_scan_user();
|
||||
}
|
||||
|
||||
bool process_record_kb(uint16_t keycode, keyrecord_t *record) {
|
||||
// put your per-action keyboard code here
|
||||
// runs for every action, just before processing by the firmware
|
||||
|
||||
return process_record_user(keycode, record);
|
||||
}
|
||||
|
||||
void led_set_kb(uint8_t usb_led) {
|
||||
// put your keyboard LED indicator (ex: Caps Lock LED) toggling code here
|
||||
|
||||
if (is_keyboard_master()) {
|
||||
|
||||
serial_m2s_buffer.nlock_led = IS_LED_ON(usb_led, USB_LED_NUM_LOCK);
|
||||
serial_m2s_buffer.clock_led = IS_LED_ON(usb_led, USB_LED_CAPS_LOCK);
|
||||
serial_m2s_buffer.slock_led = IS_LED_ON(usb_led, USB_LED_SCROLL_LOCK);
|
||||
|
||||
led_toggle(3, IS_LED_ON(usb_led, USB_LED_NUM_LOCK));
|
||||
led_toggle(4, IS_LED_ON(usb_led, USB_LED_CAPS_LOCK));
|
||||
led_toggle(5, IS_LED_ON(usb_led, USB_LED_SCROLL_LOCK));
|
||||
|
||||
}
|
||||
|
||||
led_set_user(usb_led);
|
||||
}
|
||||
|
||||
uint32_t layer_state_set_kb(uint32_t state) {
|
||||
|
||||
if (is_keyboard_master())
|
||||
{
|
||||
|
||||
current_layer = biton32(state);
|
||||
serial_m2s_buffer.current_layer = biton32(state);
|
||||
|
||||
// If left half, do the LED toggle thing
|
||||
if (isLeftHand)
|
||||
{
|
||||
set_layer_indicators(biton32(state));
|
||||
}
|
||||
|
||||
}
|
||||
// NOTE: Do not set slave LEDs here.
|
||||
// This is not called on slave
|
||||
|
||||
return layer_state_set_user(state);
|
||||
}
|
||||
|
||||
|
||||
@@ -1,65 +0,0 @@
|
||||
/* Copyright 2018 Ryota Goto
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#ifndef ORBIT_H
|
||||
#define ORBIT_H
|
||||
|
||||
#include "quantum.h"
|
||||
|
||||
/* This a shortcut to help you visually see your layout.
|
||||
*
|
||||
* The first section contains all of the arguments representing the physical
|
||||
* layout of the board and position of the keys.
|
||||
*
|
||||
* The second converts the arguments into a two-dimensional array which
|
||||
* represents the switch matrix.
|
||||
*/
|
||||
|
||||
#ifdef USE_I2C
|
||||
#include <stddef.h>
|
||||
#ifdef __AVR__
|
||||
#include <avr/io.h>
|
||||
#include <avr/interrupt.h>
|
||||
#endif
|
||||
#endif
|
||||
|
||||
|
||||
#define LAYOUT( \
|
||||
L00, L01, L02, L03, L04, L05, L06, R00, R01, R02, R03, R04, R05, R06, \
|
||||
L10, L11, L12, L13, L14, L15, L16, R10, R11, R12, R13, R14, R15, R16, \
|
||||
L20, L21, L22, L23, L24, L25, L26, R20, R21, R22, R23, R24, R25, R26, \
|
||||
L30, L31, L32, L33, L34, L35, L36, R30, R31, R32, R33, R34, R35, R36, \
|
||||
L41, L42, L43, L44, L45, L46, R40, R41, R42, R43, R44, R45 \
|
||||
) \
|
||||
{ \
|
||||
{ L00, L01, L02, L03, L04, L05, L06 }, \
|
||||
{ L10, L11, L12, L13, L14, L15, L16 }, \
|
||||
{ L20, L21, L22, L23, L24, L25, L26 }, \
|
||||
{ L30, L31, L32, L33, L34, L35, L36 }, \
|
||||
{ KC_NO, L41, L42, L43, L44, L45, L46 }, \
|
||||
{ R00, R01, R02, R03, R04, R05, R06 }, \
|
||||
{ R10, R11, R12, R13, R14, R15, R16 }, \
|
||||
{ R20, R21, R22, R23, R24, R25, R26 }, \
|
||||
{ R30, R31, R32, R33, R34, R35, R36 }, \
|
||||
{ R40, R41, R42, R43, R44, R45, KC_NO } \
|
||||
}
|
||||
|
||||
uint8_t current_layer;
|
||||
|
||||
extern void led_toggle(int id, bool on);
|
||||
void set_all_leds(bool leds[6]);
|
||||
extern void set_layer_indicators(uint8_t layer);
|
||||
|
||||
#endif
|
||||
@@ -1,15 +0,0 @@
|
||||
# Orbit
|
||||
|
||||
|
||||
|
||||
A split ergonomic keyboard project.
|
||||
|
||||
Keyboard Maintainer: [ai03](https://github.com/ai03-2725)
|
||||
Hardware Supported: The [Orbit PCB](https://github.com/ai03-2725/Orbit)
|
||||
Hardware Availability: [This repository](https://github.com/ai03-2725/Orbit) has PCB files. Case group buy orders are currently closed.
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
make ai03/orbit:default
|
||||
|
||||
See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs).
|
||||
@@ -1,92 +0,0 @@
|
||||
SRC += split_util.c \
|
||||
split_flags.c \
|
||||
serial.c \
|
||||
transport.c \
|
||||
matrix.c
|
||||
|
||||
# MCU name
|
||||
#MCU = at90usb1286
|
||||
MCU = atmega32u4
|
||||
|
||||
# Processor frequency.
|
||||
# This will define a symbol, F_CPU, in all source code files equal to the
|
||||
# processor frequency in Hz. You can then use this symbol in your source code to
|
||||
# calculate timings. Do NOT tack on a 'UL' at the end, this will be done
|
||||
# automatically to create a 32-bit value in your source code.
|
||||
#
|
||||
# This will be an integer division of F_USB below, as it is sourced by
|
||||
# F_USB after it has run through any CPU prescalers. Note that this value
|
||||
# does not *change* the processor frequency - it should merely be updated to
|
||||
# reflect the processor speed set externally so that the code can use accurate
|
||||
# software delays.
|
||||
F_CPU = 16000000
|
||||
|
||||
|
||||
#
|
||||
# LUFA specific
|
||||
#
|
||||
# Target architecture (see library "Board Types" documentation).
|
||||
ARCH = AVR8
|
||||
|
||||
# Input clock frequency.
|
||||
# This will define a symbol, F_USB, in all source code files equal to the
|
||||
# input clock frequency (before any prescaling is performed) in Hz. This value may
|
||||
# differ from F_CPU if prescaling is used on the latter, and is required as the
|
||||
# raw input clock is fed directly to the PLL sections of the AVR for high speed
|
||||
# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL'
|
||||
# at the end, this will be done automatically to create a 32-bit value in your
|
||||
# source code.
|
||||
#
|
||||
# If no clock division is performed on the input clock inside the AVR (via the
|
||||
# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU.
|
||||
F_USB = $(F_CPU)
|
||||
|
||||
# Interrupt driven control endpoint task(+60)
|
||||
OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT
|
||||
|
||||
|
||||
# Bootloader selection
|
||||
# Teensy halfkay
|
||||
# Pro Micro caterina
|
||||
# Atmel DFU atmel-dfu
|
||||
# LUFA DFU lufa-dfu
|
||||
# QMK DFU qmk-dfu
|
||||
# atmega32a bootloadHID
|
||||
BOOTLOADER = atmel-dfu
|
||||
|
||||
|
||||
# If you don't know the bootloader type, then you can specify the
|
||||
# Boot Section Size in *bytes* by uncommenting out the OPT_DEFS line
|
||||
# Teensy halfKay 512
|
||||
# Teensy++ halfKay 1024
|
||||
# Atmel DFU loader 4096
|
||||
# LUFA bootloader 4096
|
||||
# USBaspLoader 2048
|
||||
# OPT_DEFS += -DBOOTLOADER_SIZE=4096
|
||||
|
||||
|
||||
# Build Options
|
||||
# change yes to no to disable
|
||||
#
|
||||
BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000)
|
||||
MOUSEKEY_ENABLE = yes # Mouse keys(+4700)
|
||||
EXTRAKEY_ENABLE = yes # Audio control and System control(+450)
|
||||
CONSOLE_ENABLE = no # Console for debug(+400)
|
||||
COMMAND_ENABLE = no # Commands for debug and configuration
|
||||
# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE
|
||||
SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend
|
||||
# if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work
|
||||
NKRO_ENABLE = yes # USB Nkey Rollover
|
||||
BACKLIGHT_ENABLE = yes # Enable keyboard backlight functionality on B7 by default
|
||||
RGBLIGHT_ENABLE = no # Enable keyboard RGB underglow
|
||||
MIDI_ENABLE = no # MIDI support (+2400 to 4200, depending on config)
|
||||
UNICODE_ENABLE = no # Unicode
|
||||
BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID
|
||||
AUDIO_ENABLE = no # Audio output on port C6
|
||||
FAUXCLICKY_ENABLE = no # Use buzzer to emulate clicky switches
|
||||
HD44780_ENABLE = no # Enable support for HD44780 based LCDs (+400)
|
||||
USE_I2C = no # I2C for split communication
|
||||
CUSTOM_MATRIX = yes # For providing custom matrix.c (in this case, override regular matrix.c with split matrix.c)
|
||||
# SPLIT_KEYBOARD = yes # Split keyboard flag disabled as manual edits had to be done to the split common files
|
||||
|
||||
|
||||
@@ -1,546 +0,0 @@
|
||||
/*
|
||||
* WARNING: be careful changing this code, it is very timing dependent
|
||||
*
|
||||
* 2018-10-28 checked
|
||||
* avr-gcc 4.9.2
|
||||
* avr-gcc 5.4.0
|
||||
* avr-gcc 7.3.0
|
||||
*/
|
||||
|
||||
#ifndef F_CPU
|
||||
#define F_CPU 16000000
|
||||
#endif
|
||||
|
||||
#include <avr/io.h>
|
||||
#include <avr/interrupt.h>
|
||||
#include <util/delay.h>
|
||||
#include <stddef.h>
|
||||
#include <stdbool.h>
|
||||
#include "serial.h"
|
||||
//#include <pro_micro.h>
|
||||
|
||||
#ifdef SOFT_SERIAL_PIN
|
||||
|
||||
#ifdef __AVR_ATmega32U4__
|
||||
// if using ATmega32U4 I2C, can not use PD0 and PD1 in soft serial.
|
||||
#ifdef USE_AVR_I2C
|
||||
#if SOFT_SERIAL_PIN == D0 || SOFT_SERIAL_PIN == D1
|
||||
#error Using ATmega32U4 I2C, so can not use PD0, PD1
|
||||
#endif
|
||||
#endif
|
||||
|
||||
#if SOFT_SERIAL_PIN >= D0 && SOFT_SERIAL_PIN <= D3
|
||||
#define SERIAL_PIN_DDR DDRD
|
||||
#define SERIAL_PIN_PORT PORTD
|
||||
#define SERIAL_PIN_INPUT PIND
|
||||
#if SOFT_SERIAL_PIN == D0
|
||||
#define SERIAL_PIN_MASK _BV(PD0)
|
||||
#define EIMSK_BIT _BV(INT0)
|
||||
#define EICRx_BIT (~(_BV(ISC00) | _BV(ISC01)))
|
||||
#define SERIAL_PIN_INTERRUPT INT0_vect
|
||||
#elif SOFT_SERIAL_PIN == D1
|
||||
#define SERIAL_PIN_MASK _BV(PD1)
|
||||
#define EIMSK_BIT _BV(INT1)
|
||||
#define EICRx_BIT (~(_BV(ISC10) | _BV(ISC11)))
|
||||
#define SERIAL_PIN_INTERRUPT INT1_vect
|
||||
#elif SOFT_SERIAL_PIN == D2
|
||||
#define SERIAL_PIN_MASK _BV(PD2)
|
||||
#define EIMSK_BIT _BV(INT2)
|
||||
#define EICRx_BIT (~(_BV(ISC20) | _BV(ISC21)))
|
||||
#define SERIAL_PIN_INTERRUPT INT2_vect
|
||||
#elif SOFT_SERIAL_PIN == D3
|
||||
#define SERIAL_PIN_MASK _BV(PD3)
|
||||
#define EIMSK_BIT _BV(INT3)
|
||||
#define EICRx_BIT (~(_BV(ISC30) | _BV(ISC31)))
|
||||
#define SERIAL_PIN_INTERRUPT INT3_vect
|
||||
#endif
|
||||
#elif SOFT_SERIAL_PIN == E6
|
||||
#define SERIAL_PIN_DDR DDRE
|
||||
#define SERIAL_PIN_PORT PORTE
|
||||
#define SERIAL_PIN_INPUT PINE
|
||||
#define SERIAL_PIN_MASK _BV(PE6)
|
||||
#define EIMSK_BIT _BV(INT6)
|
||||
#define EICRx_BIT (~(_BV(ISC60) | _BV(ISC61)))
|
||||
#define SERIAL_PIN_INTERRUPT INT6_vect
|
||||
#else
|
||||
#error invalid SOFT_SERIAL_PIN value
|
||||
#endif
|
||||
|
||||
#else
|
||||
#error serial.c now support ATmega32U4 only
|
||||
#endif
|
||||
|
||||
#define ALWAYS_INLINE __attribute__((always_inline))
|
||||
#define NO_INLINE __attribute__((noinline))
|
||||
#define _delay_sub_us(x) __builtin_avr_delay_cycles(x)
|
||||
|
||||
// parity check
|
||||
#define ODD_PARITY 1
|
||||
#define EVEN_PARITY 0
|
||||
#define PARITY EVEN_PARITY
|
||||
|
||||
#ifdef SERIAL_DELAY
|
||||
// custom setup in config.h
|
||||
// #define TID_SEND_ADJUST 2
|
||||
// #define SERIAL_DELAY 6 // micro sec
|
||||
// #define READ_WRITE_START_ADJUST 30 // cycles
|
||||
// #define READ_WRITE_WIDTH_ADJUST 8 // cycles
|
||||
#else
|
||||
// ============ Standard setups ============
|
||||
|
||||
#ifndef SELECT_SOFT_SERIAL_SPEED
|
||||
#define SELECT_SOFT_SERIAL_SPEED 1
|
||||
// 0: about 189kbps (Experimental only)
|
||||
// 1: about 137kbps (default)
|
||||
// 2: about 75kbps
|
||||
// 3: about 39kbps
|
||||
// 4: about 26kbps
|
||||
// 5: about 20kbps
|
||||
#endif
|
||||
|
||||
#if __GNUC__ < 6
|
||||
#define TID_SEND_ADJUST 14
|
||||
#else
|
||||
#define TID_SEND_ADJUST 2
|
||||
#endif
|
||||
|
||||
#if SELECT_SOFT_SERIAL_SPEED == 0
|
||||
// Very High speed
|
||||
#define SERIAL_DELAY 4 // micro sec
|
||||
#if __GNUC__ < 6
|
||||
#define READ_WRITE_START_ADJUST 33 // cycles
|
||||
#define READ_WRITE_WIDTH_ADJUST 3 // cycles
|
||||
#else
|
||||
#define READ_WRITE_START_ADJUST 34 // cycles
|
||||
#define READ_WRITE_WIDTH_ADJUST 7 // cycles
|
||||
#endif
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 1
|
||||
// High speed
|
||||
#define SERIAL_DELAY 6 // micro sec
|
||||
#if __GNUC__ < 6
|
||||
#define READ_WRITE_START_ADJUST 30 // cycles
|
||||
#define READ_WRITE_WIDTH_ADJUST 3 // cycles
|
||||
#else
|
||||
#define READ_WRITE_START_ADJUST 33 // cycles
|
||||
#define READ_WRITE_WIDTH_ADJUST 7 // cycles
|
||||
#endif
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 2
|
||||
// Middle speed
|
||||
#define SERIAL_DELAY 12 // micro sec
|
||||
#define READ_WRITE_START_ADJUST 30 // cycles
|
||||
#if __GNUC__ < 6
|
||||
#define READ_WRITE_WIDTH_ADJUST 3 // cycles
|
||||
#else
|
||||
#define READ_WRITE_WIDTH_ADJUST 7 // cycles
|
||||
#endif
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 3
|
||||
// Low speed
|
||||
#define SERIAL_DELAY 24 // micro sec
|
||||
#define READ_WRITE_START_ADJUST 30 // cycles
|
||||
#if __GNUC__ < 6
|
||||
#define READ_WRITE_WIDTH_ADJUST 3 // cycles
|
||||
#else
|
||||
#define READ_WRITE_WIDTH_ADJUST 7 // cycles
|
||||
#endif
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 4
|
||||
// Very Low speed
|
||||
#define SERIAL_DELAY 36 // micro sec
|
||||
#define READ_WRITE_START_ADJUST 30 // cycles
|
||||
#if __GNUC__ < 6
|
||||
#define READ_WRITE_WIDTH_ADJUST 3 // cycles
|
||||
#else
|
||||
#define READ_WRITE_WIDTH_ADJUST 7 // cycles
|
||||
#endif
|
||||
#elif SELECT_SOFT_SERIAL_SPEED == 5
|
||||
// Ultra Low speed
|
||||
#define SERIAL_DELAY 48 // micro sec
|
||||
#define READ_WRITE_START_ADJUST 30 // cycles
|
||||
#if __GNUC__ < 6
|
||||
#define READ_WRITE_WIDTH_ADJUST 3 // cycles
|
||||
#else
|
||||
#define READ_WRITE_WIDTH_ADJUST 7 // cycles
|
||||
#endif
|
||||
#else
|
||||
#error invalid SELECT_SOFT_SERIAL_SPEED value
|
||||
#endif /* SELECT_SOFT_SERIAL_SPEED */
|
||||
#endif /* SERIAL_DELAY */
|
||||
|
||||
#define SERIAL_DELAY_HALF1 (SERIAL_DELAY/2)
|
||||
#define SERIAL_DELAY_HALF2 (SERIAL_DELAY - SERIAL_DELAY/2)
|
||||
|
||||
#define SLAVE_INT_WIDTH_US 1
|
||||
#ifndef SERIAL_USE_MULTI_TRANSACTION
|
||||
#define SLAVE_INT_RESPONSE_TIME SERIAL_DELAY
|
||||
#else
|
||||
#define SLAVE_INT_ACK_WIDTH_UNIT 2
|
||||
#define SLAVE_INT_ACK_WIDTH 4
|
||||
#endif
|
||||
|
||||
static SSTD_t *Transaction_table = NULL;
|
||||
static uint8_t Transaction_table_size = 0;
|
||||
|
||||
inline static void serial_delay(void) ALWAYS_INLINE;
|
||||
inline static
|
||||
void serial_delay(void) {
|
||||
_delay_us(SERIAL_DELAY);
|
||||
}
|
||||
|
||||
inline static void serial_delay_half1(void) ALWAYS_INLINE;
|
||||
inline static
|
||||
void serial_delay_half1(void) {
|
||||
_delay_us(SERIAL_DELAY_HALF1);
|
||||
}
|
||||
|
||||
inline static void serial_delay_half2(void) ALWAYS_INLINE;
|
||||
inline static
|
||||
void serial_delay_half2(void) {
|
||||
_delay_us(SERIAL_DELAY_HALF2);
|
||||
}
|
||||
|
||||
inline static void serial_output(void) ALWAYS_INLINE;
|
||||
inline static
|
||||
void serial_output(void) {
|
||||
SERIAL_PIN_DDR |= SERIAL_PIN_MASK;
|
||||
}
|
||||
|
||||
// make the serial pin an input with pull-up resistor
|
||||
inline static void serial_input_with_pullup(void) ALWAYS_INLINE;
|
||||
inline static
|
||||
void serial_input_with_pullup(void) {
|
||||
SERIAL_PIN_DDR &= ~SERIAL_PIN_MASK;
|
||||
SERIAL_PIN_PORT |= SERIAL_PIN_MASK;
|
||||
}
|
||||
|
||||
inline static uint8_t serial_read_pin(void) ALWAYS_INLINE;
|
||||
inline static
|
||||
uint8_t serial_read_pin(void) {
|
||||
return !!(SERIAL_PIN_INPUT & SERIAL_PIN_MASK);
|
||||
}
|
||||
|
||||
inline static void serial_low(void) ALWAYS_INLINE;
|
||||
inline static
|
||||
void serial_low(void) {
|
||||
SERIAL_PIN_PORT &= ~SERIAL_PIN_MASK;
|
||||
}
|
||||
|
||||
inline static void serial_high(void) ALWAYS_INLINE;
|
||||
inline static
|
||||
void serial_high(void) {
|
||||
SERIAL_PIN_PORT |= SERIAL_PIN_MASK;
|
||||
}
|
||||
|
||||
void soft_serial_initiator_init(SSTD_t *sstd_table, int sstd_table_size)
|
||||
{
|
||||
Transaction_table = sstd_table;
|
||||
Transaction_table_size = (uint8_t)sstd_table_size;
|
||||
serial_output();
|
||||
serial_high();
|
||||
}
|
||||
|
||||
void soft_serial_target_init(SSTD_t *sstd_table, int sstd_table_size)
|
||||
{
|
||||
Transaction_table = sstd_table;
|
||||
Transaction_table_size = (uint8_t)sstd_table_size;
|
||||
serial_input_with_pullup();
|
||||
|
||||
// Enable INT0-INT3,INT6
|
||||
EIMSK |= EIMSK_BIT;
|
||||
#if SERIAL_PIN_MASK == _BV(PE6)
|
||||
// Trigger on falling edge of INT6
|
||||
EICRB &= EICRx_BIT;
|
||||
#else
|
||||
// Trigger on falling edge of INT0-INT3
|
||||
EICRA &= EICRx_BIT;
|
||||
#endif
|
||||
}
|
||||
|
||||
// Used by the sender to synchronize timing with the reciver.
|
||||
static void sync_recv(void) NO_INLINE;
|
||||
static
|
||||
void sync_recv(void) {
|
||||
for (uint8_t i = 0; i < SERIAL_DELAY*5 && serial_read_pin(); i++ ) {
|
||||
}
|
||||
// This shouldn't hang if the target disconnects because the
|
||||
// serial line will float to high if the target does disconnect.
|
||||
while (!serial_read_pin());
|
||||
}
|
||||
|
||||
// Used by the reciver to send a synchronization signal to the sender.
|
||||
static void sync_send(void) NO_INLINE;
|
||||
static
|
||||
void sync_send(void) {
|
||||
serial_low();
|
||||
serial_delay();
|
||||
serial_high();
|
||||
}
|
||||
|
||||
// Reads a byte from the serial line
|
||||
static uint8_t serial_read_chunk(uint8_t *pterrcount, uint8_t bit) NO_INLINE;
|
||||
static uint8_t serial_read_chunk(uint8_t *pterrcount, uint8_t bit) {
|
||||
uint8_t byte, i, p, pb;
|
||||
|
||||
_delay_sub_us(READ_WRITE_START_ADJUST);
|
||||
for( i = 0, byte = 0, p = PARITY; i < bit; i++ ) {
|
||||
serial_delay_half1(); // read the middle of pulses
|
||||
if( serial_read_pin() ) {
|
||||
byte = (byte << 1) | 1; p ^= 1;
|
||||
} else {
|
||||
byte = (byte << 1) | 0; p ^= 0;
|
||||
}
|
||||
_delay_sub_us(READ_WRITE_WIDTH_ADJUST);
|
||||
serial_delay_half2();
|
||||
}
|
||||
/* recive parity bit */
|
||||
serial_delay_half1(); // read the middle of pulses
|
||||
pb = serial_read_pin();
|
||||
_delay_sub_us(READ_WRITE_WIDTH_ADJUST);
|
||||
serial_delay_half2();
|
||||
|
||||
*pterrcount += (p != pb)? 1 : 0;
|
||||
|
||||
return byte;
|
||||
}
|
||||
|
||||
// Sends a byte with MSB ordering
|
||||
void serial_write_chunk(uint8_t data, uint8_t bit) NO_INLINE;
|
||||
void serial_write_chunk(uint8_t data, uint8_t bit) {
|
||||
uint8_t b, p;
|
||||
for( p = PARITY, b = 1<<(bit-1); b ; b >>= 1) {
|
||||
if(data & b) {
|
||||
serial_high(); p ^= 1;
|
||||
} else {
|
||||
serial_low(); p ^= 0;
|
||||
}
|
||||
serial_delay();
|
||||
}
|
||||
/* send parity bit */
|
||||
if(p & 1) { serial_high(); }
|
||||
else { serial_low(); }
|
||||
serial_delay();
|
||||
|
||||
serial_low(); // sync_send() / senc_recv() need raise edge
|
||||
}
|
||||
|
||||
static void serial_send_packet(uint8_t *buffer, uint8_t size) NO_INLINE;
|
||||
static
|
||||
void serial_send_packet(uint8_t *buffer, uint8_t size) {
|
||||
for (uint8_t i = 0; i < size; ++i) {
|
||||
uint8_t data;
|
||||
data = buffer[i];
|
||||
sync_send();
|
||||
serial_write_chunk(data,8);
|
||||
}
|
||||
}
|
||||
|
||||
static uint8_t serial_recive_packet(uint8_t *buffer, uint8_t size) NO_INLINE;
|
||||
static
|
||||
uint8_t serial_recive_packet(uint8_t *buffer, uint8_t size) {
|
||||
uint8_t pecount = 0;
|
||||
for (uint8_t i = 0; i < size; ++i) {
|
||||
uint8_t data;
|
||||
sync_recv();
|
||||
data = serial_read_chunk(&pecount, 8);
|
||||
buffer[i] = data;
|
||||
}
|
||||
return pecount == 0;
|
||||
}
|
||||
|
||||
inline static
|
||||
void change_sender2reciver(void) {
|
||||
sync_send(); //0
|
||||
serial_delay_half1(); //1
|
||||
serial_low(); //2
|
||||
serial_input_with_pullup(); //2
|
||||
serial_delay_half1(); //3
|
||||
}
|
||||
|
||||
inline static
|
||||
void change_reciver2sender(void) {
|
||||
sync_recv(); //0
|
||||
serial_delay(); //1
|
||||
serial_low(); //3
|
||||
serial_output(); //3
|
||||
serial_delay_half1(); //4
|
||||
}
|
||||
|
||||
static inline uint8_t nibble_bits_count(uint8_t bits)
|
||||
{
|
||||
bits = (bits & 0x5) + (bits >> 1 & 0x5);
|
||||
bits = (bits & 0x3) + (bits >> 2 & 0x3);
|
||||
return bits;
|
||||
}
|
||||
|
||||
// interrupt handle to be used by the target device
|
||||
ISR(SERIAL_PIN_INTERRUPT) {
|
||||
|
||||
#ifndef SERIAL_USE_MULTI_TRANSACTION
|
||||
serial_low();
|
||||
serial_output();
|
||||
SSTD_t *trans = Transaction_table;
|
||||
#else
|
||||
// recive transaction table index
|
||||
uint8_t tid, bits;
|
||||
uint8_t pecount = 0;
|
||||
sync_recv();
|
||||
bits = serial_read_chunk(&pecount,7);
|
||||
tid = bits>>3;
|
||||
bits = (bits&7) != nibble_bits_count(tid);
|
||||
if( bits || pecount> 0 || tid > Transaction_table_size ) {
|
||||
return;
|
||||
}
|
||||
serial_delay_half1();
|
||||
|
||||
serial_high(); // response step1 low->high
|
||||
serial_output();
|
||||
_delay_sub_us(SLAVE_INT_ACK_WIDTH_UNIT*SLAVE_INT_ACK_WIDTH);
|
||||
SSTD_t *trans = &Transaction_table[tid];
|
||||
serial_low(); // response step2 ack high->low
|
||||
#endif
|
||||
|
||||
// target send phase
|
||||
if( trans->target2initiator_buffer_size > 0 )
|
||||
serial_send_packet((uint8_t *)trans->target2initiator_buffer,
|
||||
trans->target2initiator_buffer_size);
|
||||
// target switch to input
|
||||
change_sender2reciver();
|
||||
|
||||
// target recive phase
|
||||
if( trans->initiator2target_buffer_size > 0 ) {
|
||||
if (serial_recive_packet((uint8_t *)trans->initiator2target_buffer,
|
||||
trans->initiator2target_buffer_size) ) {
|
||||
*trans->status = TRANSACTION_ACCEPTED;
|
||||
} else {
|
||||
*trans->status = TRANSACTION_DATA_ERROR;
|
||||
}
|
||||
} else {
|
||||
*trans->status = TRANSACTION_ACCEPTED;
|
||||
}
|
||||
|
||||
sync_recv(); //weit initiator output to high
|
||||
}
|
||||
|
||||
/////////
|
||||
// start transaction by initiator
|
||||
//
|
||||
// int soft_serial_transaction(int sstd_index)
|
||||
//
|
||||
// Returns:
|
||||
// TRANSACTION_END
|
||||
// TRANSACTION_NO_RESPONSE
|
||||
// TRANSACTION_DATA_ERROR
|
||||
// this code is very time dependent, so we need to disable interrupts
|
||||
#ifndef SERIAL_USE_MULTI_TRANSACTION
|
||||
int soft_serial_transaction(void) {
|
||||
SSTD_t *trans = Transaction_table;
|
||||
#else
|
||||
int soft_serial_transaction(int sstd_index) {
|
||||
if( sstd_index > Transaction_table_size )
|
||||
return TRANSACTION_TYPE_ERROR;
|
||||
SSTD_t *trans = &Transaction_table[sstd_index];
|
||||
#endif
|
||||
cli();
|
||||
|
||||
// signal to the target that we want to start a transaction
|
||||
serial_output();
|
||||
serial_low();
|
||||
_delay_us(SLAVE_INT_WIDTH_US);
|
||||
|
||||
#ifndef SERIAL_USE_MULTI_TRANSACTION
|
||||
// wait for the target response
|
||||
serial_input_with_pullup();
|
||||
_delay_us(SLAVE_INT_RESPONSE_TIME);
|
||||
|
||||
// check if the target is present
|
||||
if (serial_read_pin()) {
|
||||
// target failed to pull the line low, assume not present
|
||||
serial_output();
|
||||
serial_high();
|
||||
*trans->status = TRANSACTION_NO_RESPONSE;
|
||||
sei();
|
||||
return TRANSACTION_NO_RESPONSE;
|
||||
}
|
||||
|
||||
#else
|
||||
// send transaction table index
|
||||
int tid = (sstd_index<<3) | (7 & nibble_bits_count(sstd_index));
|
||||
sync_send();
|
||||
_delay_sub_us(TID_SEND_ADJUST);
|
||||
serial_write_chunk(tid, 7);
|
||||
serial_delay_half1();
|
||||
|
||||
// wait for the target response (step1 low->high)
|
||||
serial_input_with_pullup();
|
||||
while( !serial_read_pin() ) {
|
||||
_delay_sub_us(2);
|
||||
}
|
||||
|
||||
// check if the target is present (step2 high->low)
|
||||
for( int i = 0; serial_read_pin(); i++ ) {
|
||||
if (i > SLAVE_INT_ACK_WIDTH + 1) {
|
||||
// slave failed to pull the line low, assume not present
|
||||
serial_output();
|
||||
serial_high();
|
||||
*trans->status = TRANSACTION_NO_RESPONSE;
|
||||
sei();
|
||||
return TRANSACTION_NO_RESPONSE;
|
||||
}
|
||||
_delay_sub_us(SLAVE_INT_ACK_WIDTH_UNIT);
|
||||
}
|
||||
#endif
|
||||
|
||||
// initiator recive phase
|
||||
// if the target is present syncronize with it
|
||||
if( trans->target2initiator_buffer_size > 0 ) {
|
||||
if (!serial_recive_packet((uint8_t *)trans->target2initiator_buffer,
|
||||
trans->target2initiator_buffer_size) ) {
|
||||
serial_output();
|
||||
serial_high();
|
||||
*trans->status = TRANSACTION_DATA_ERROR;
|
||||
sei();
|
||||
return TRANSACTION_DATA_ERROR;
|
||||
}
|
||||
}
|
||||
|
||||
// initiator switch to output
|
||||
change_reciver2sender();
|
||||
|
||||
// initiator send phase
|
||||
if( trans->initiator2target_buffer_size > 0 ) {
|
||||
serial_send_packet((uint8_t *)trans->initiator2target_buffer,
|
||||
trans->initiator2target_buffer_size);
|
||||
}
|
||||
|
||||
// always, release the line when not in use
|
||||
sync_send();
|
||||
|
||||
*trans->status = TRANSACTION_END;
|
||||
sei();
|
||||
return TRANSACTION_END;
|
||||
}
|
||||
|
||||
#ifdef SERIAL_USE_MULTI_TRANSACTION
|
||||
int soft_serial_get_and_clean_status(int sstd_index) {
|
||||
SSTD_t *trans = &Transaction_table[sstd_index];
|
||||
cli();
|
||||
int retval = *trans->status;
|
||||
*trans->status = 0;;
|
||||
sei();
|
||||
return retval;
|
||||
}
|
||||
#endif
|
||||
|
||||
#endif
|
||||
|
||||
// Helix serial.c history
|
||||
// 2018-1-29 fork from let's split and add PD2, modify sync_recv() (#2308, bceffdefc)
|
||||
// 2018-6-28 bug fix master to slave comm and speed up (#3255, 1038bbef4)
|
||||
// (adjusted with avr-gcc 4.9.2)
|
||||
// 2018-7-13 remove USE_SERIAL_PD2 macro (#3374, f30d6dd78)
|
||||
// (adjusted with avr-gcc 4.9.2)
|
||||
// 2018-8-11 add support multi-type transaction (#3608, feb5e4aae)
|
||||
// (adjusted with avr-gcc 4.9.2)
|
||||
// 2018-10-21 fix serial and RGB animation conflict (#4191, 4665e4fff)
|
||||
// (adjusted with avr-gcc 7.3.0)
|
||||
// 2018-10-28 re-adjust compiler depend value of delay (#4269, 8517f8a66)
|
||||
// (adjusted with avr-gcc 5.4.0, 7.3.0)
|
||||
// 2018-12-17 copy to TOP/quantum/split_common/ and remove backward compatibility code (#4669)
|
||||
@@ -1,62 +0,0 @@
|
||||
#pragma once
|
||||
|
||||
#include <stdbool.h>
|
||||
|
||||
// /////////////////////////////////////////////////////////////////
|
||||
// Need Soft Serial defines in config.h
|
||||
// /////////////////////////////////////////////////////////////////
|
||||
// ex.
|
||||
// #define SOFT_SERIAL_PIN ?? // ?? = D0,D1,D2,D3,E6
|
||||
// OPTIONAL: #define SELECT_SOFT_SERIAL_SPEED ? // ? = 1,2,3,4,5
|
||||
// // 1: about 137kbps (default)
|
||||
// // 2: about 75kbps
|
||||
// // 3: about 39kbps
|
||||
// // 4: about 26kbps
|
||||
// // 5: about 20kbps
|
||||
//
|
||||
// //// USE simple API (using signle-type transaction function)
|
||||
// /* nothing */
|
||||
// //// USE flexible API (using multi-type transaction function)
|
||||
// #define SERIAL_USE_MULTI_TRANSACTION
|
||||
//
|
||||
// /////////////////////////////////////////////////////////////////
|
||||
|
||||
// Soft Serial Transaction Descriptor
|
||||
typedef struct _SSTD_t {
|
||||
uint8_t *status;
|
||||
uint8_t initiator2target_buffer_size;
|
||||
uint8_t *initiator2target_buffer;
|
||||
uint8_t target2initiator_buffer_size;
|
||||
uint8_t *target2initiator_buffer;
|
||||
} SSTD_t;
|
||||
#define TID_LIMIT( table ) (sizeof(table) / sizeof(SSTD_t))
|
||||
|
||||
// initiator is transaction start side
|
||||
void soft_serial_initiator_init(SSTD_t *sstd_table, int sstd_table_size);
|
||||
// target is interrupt accept side
|
||||
void soft_serial_target_init(SSTD_t *sstd_table, int sstd_table_size);
|
||||
|
||||
// initiator resullt
|
||||
#define TRANSACTION_END 0
|
||||
#define TRANSACTION_NO_RESPONSE 0x1
|
||||
#define TRANSACTION_DATA_ERROR 0x2
|
||||
#define TRANSACTION_TYPE_ERROR 0x4
|
||||
#ifndef SERIAL_USE_MULTI_TRANSACTION
|
||||
int soft_serial_transaction(void);
|
||||
#else
|
||||
int soft_serial_transaction(int sstd_index);
|
||||
#endif
|
||||
|
||||
// target status
|
||||
// *SSTD_t.status has
|
||||
// initiator:
|
||||
// TRANSACTION_END
|
||||
// or TRANSACTION_NO_RESPONSE
|
||||
// or TRANSACTION_DATA_ERROR
|
||||
// target:
|
||||
// TRANSACTION_DATA_ERROR
|
||||
// or TRANSACTION_ACCEPTED
|
||||
#define TRANSACTION_ACCEPTED 0x8
|
||||
#ifdef SERIAL_USE_MULTI_TRANSACTION
|
||||
int soft_serial_get_and_clean_status(int sstd_index);
|
||||
#endif
|
||||
@@ -1,5 +0,0 @@
|
||||
#include "split_flags.h"
|
||||
|
||||
volatile bool RGB_DIRTY = false;
|
||||
|
||||
volatile bool BACKLIT_DIRTY = false;
|
||||
@@ -1,15 +0,0 @@
|
||||
#pragma once
|
||||
|
||||
#include <stdbool.h>
|
||||
#include <stdint.h>
|
||||
|
||||
/**
|
||||
* Global Flags
|
||||
**/
|
||||
|
||||
//RGB Stuff
|
||||
extern volatile bool RGB_DIRTY;
|
||||
|
||||
|
||||
//Backlight Stuff
|
||||
extern volatile bool BACKLIT_DIRTY;
|
||||
@@ -1,87 +0,0 @@
|
||||
#include "split_util.h"
|
||||
#include "matrix.h"
|
||||
#include "keyboard.h"
|
||||
#include "config.h"
|
||||
#include "timer.h"
|
||||
#include "split_flags.h"
|
||||
#include "transport.h"
|
||||
#include "quantum.h"
|
||||
|
||||
#ifdef EE_HANDS
|
||||
# include "tmk_core/common/eeprom.h"
|
||||
# include "eeconfig.h"
|
||||
#endif
|
||||
|
||||
volatile bool isLeftHand = true;
|
||||
|
||||
__attribute__((weak))
|
||||
bool is_keyboard_left(void) {
|
||||
#ifdef SPLIT_HAND_PIN
|
||||
// Test pin SPLIT_HAND_PIN for High/Low, if low it's right hand
|
||||
setPinInput(SPLIT_HAND_PIN);
|
||||
return readPin(SPLIT_HAND_PIN);
|
||||
#else
|
||||
#ifdef EE_HANDS
|
||||
return eeprom_read_byte(EECONFIG_HANDEDNESS);
|
||||
#else
|
||||
#ifdef MASTER_RIGHT
|
||||
return !is_keyboard_master();
|
||||
#else
|
||||
return is_keyboard_master();
|
||||
#endif
|
||||
#endif
|
||||
#endif
|
||||
}
|
||||
|
||||
bool is_keyboard_master(void)
|
||||
{
|
||||
#ifdef __AVR__
|
||||
static enum { UNKNOWN, MASTER, SLAVE } usbstate = UNKNOWN;
|
||||
|
||||
// only check once, as this is called often
|
||||
if (usbstate == UNKNOWN)
|
||||
{
|
||||
USBCON |= (1 << OTGPADE); // enables VBUS pad
|
||||
wait_us(5);
|
||||
|
||||
usbstate = (USBSTA & (1 << VBUS)) ? MASTER : SLAVE; // checks state of VBUS
|
||||
}
|
||||
|
||||
return (usbstate == MASTER);
|
||||
#else
|
||||
return true;
|
||||
#endif
|
||||
}
|
||||
|
||||
static void keyboard_master_setup(void) {
|
||||
#if defined(USE_I2C) || defined(EH)
|
||||
#ifdef SSD1306OLED
|
||||
matrix_master_OLED_init ();
|
||||
#endif
|
||||
#endif
|
||||
transport_master_init();
|
||||
|
||||
// For master the Backlight info needs to be sent on startup
|
||||
// Otherwise the salve won't start with the proper info until an update
|
||||
BACKLIT_DIRTY = true;
|
||||
}
|
||||
|
||||
static void keyboard_slave_setup(void)
|
||||
{
|
||||
transport_slave_init();
|
||||
}
|
||||
|
||||
// this code runs before the usb and keyboard is initialized
|
||||
void matrix_setup(void)
|
||||
{
|
||||
isLeftHand = is_keyboard_left();
|
||||
|
||||
if (is_keyboard_master())
|
||||
{
|
||||
keyboard_master_setup();
|
||||
}
|
||||
else
|
||||
{
|
||||
keyboard_slave_setup();
|
||||
}
|
||||
}
|
||||
@@ -1,10 +0,0 @@
|
||||
#pragma once
|
||||
|
||||
#include <stdbool.h>
|
||||
#include <stdint.h>
|
||||
#include <stdio.h>
|
||||
#include <stdlib.h>
|
||||
|
||||
extern volatile bool isLeftHand;
|
||||
|
||||
void matrix_master_OLED_init (void);
|
||||
@@ -1,238 +0,0 @@
|
||||
|
||||
#include "transport.h"
|
||||
|
||||
#include "config.h"
|
||||
#include "matrix.h"
|
||||
#include "quantum.h"
|
||||
|
||||
#include "orbit.h"
|
||||
|
||||
#define ROWS_PER_HAND (MATRIX_ROWS/2)
|
||||
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
# include "rgblight.h"
|
||||
#endif
|
||||
|
||||
#ifdef BACKLIGHT_ENABLE
|
||||
# include "backlight.h"
|
||||
extern backlight_config_t backlight_config;
|
||||
#endif
|
||||
|
||||
#if defined(USE_I2C) || defined(EH)
|
||||
|
||||
#include "i2c.h"
|
||||
|
||||
#ifndef SLAVE_I2C_ADDRESS
|
||||
# define SLAVE_I2C_ADDRESS 0x32
|
||||
#endif
|
||||
|
||||
#if (MATRIX_COLS > 8)
|
||||
# error "Currently only supports 8 COLS"
|
||||
#endif
|
||||
|
||||
// Get rows from other half over i2c
|
||||
bool transport_master(matrix_row_t matrix[]) {
|
||||
int err = 0;
|
||||
|
||||
// write backlight info
|
||||
#ifdef BACKLIGHT_ENABLE
|
||||
if (BACKLIT_DIRTY) {
|
||||
err = i2c_master_start(SLAVE_I2C_ADDRESS + I2C_WRITE);
|
||||
if (err) { goto i2c_error; }
|
||||
|
||||
// Backlight location
|
||||
err = i2c_master_write(I2C_BACKLIT_START);
|
||||
if (err) { goto i2c_error; }
|
||||
|
||||
// Write backlight
|
||||
i2c_master_write(get_backlight_level());
|
||||
|
||||
BACKLIT_DIRTY = false;
|
||||
}
|
||||
#endif
|
||||
|
||||
err = i2c_master_start(SLAVE_I2C_ADDRESS + I2C_WRITE);
|
||||
if (err) { goto i2c_error; }
|
||||
|
||||
// start of matrix stored at I2C_KEYMAP_START
|
||||
err = i2c_master_write(I2C_KEYMAP_START);
|
||||
if (err) { goto i2c_error; }
|
||||
|
||||
// Start read
|
||||
err = i2c_master_start(SLAVE_I2C_ADDRESS + I2C_READ);
|
||||
if (err) { goto i2c_error; }
|
||||
|
||||
if (!err) {
|
||||
int i;
|
||||
for (i = 0; i < ROWS_PER_HAND-1; ++i) {
|
||||
matrix[i] = i2c_master_read(I2C_ACK);
|
||||
}
|
||||
matrix[i] = i2c_master_read(I2C_NACK);
|
||||
i2c_master_stop();
|
||||
} else {
|
||||
i2c_error: // the cable is disconnceted, or something else went wrong
|
||||
i2c_reset_state();
|
||||
return false;
|
||||
}
|
||||
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
if (RGB_DIRTY) {
|
||||
err = i2c_master_start(SLAVE_I2C_ADDRESS + I2C_WRITE);
|
||||
if (err) { goto i2c_error; }
|
||||
|
||||
// RGB Location
|
||||
err = i2c_master_write(I2C_RGB_START);
|
||||
if (err) { goto i2c_error; }
|
||||
|
||||
uint32_t dword = eeconfig_read_rgblight();
|
||||
|
||||
// Write RGB
|
||||
err = i2c_master_write_data(&dword, 4);
|
||||
if (err) { goto i2c_error; }
|
||||
|
||||
RGB_DIRTY = false;
|
||||
i2c_master_stop();
|
||||
}
|
||||
#endif
|
||||
|
||||
return true;
|
||||
}
|
||||
|
||||
void transport_slave(matrix_row_t matrix[]) {
|
||||
|
||||
for (int i = 0; i < ROWS_PER_HAND; ++i)
|
||||
{
|
||||
i2c_slave_buffer[I2C_KEYMAP_START + i] = matrix[i];
|
||||
}
|
||||
// Read Backlight Info
|
||||
#ifdef BACKLIGHT_ENABLE
|
||||
if (BACKLIT_DIRTY)
|
||||
{
|
||||
backlight_set(i2c_slave_buffer[I2C_BACKLIT_START]);
|
||||
BACKLIT_DIRTY = false;
|
||||
}
|
||||
#endif
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
if (RGB_DIRTY)
|
||||
{
|
||||
// Disable interupts (RGB data is big)
|
||||
cli();
|
||||
// Create new DWORD for RGB data
|
||||
uint32_t dword;
|
||||
|
||||
// Fill the new DWORD with the data that was sent over
|
||||
uint8_t * dword_dat = (uint8_t *)(&dword);
|
||||
for (int i = 0; i < 4; i++)
|
||||
{
|
||||
dword_dat[i] = i2c_slave_buffer[I2C_RGB_START + i];
|
||||
}
|
||||
|
||||
// Update the RGB now with the new data and set RGB_DIRTY to false
|
||||
rgblight_update_dword(dword);
|
||||
RGB_DIRTY = false;
|
||||
// Re-enable interupts now that RGB is set
|
||||
sei();
|
||||
}
|
||||
#endif
|
||||
}
|
||||
|
||||
void transport_master_init(void) {
|
||||
i2c_master_init();
|
||||
}
|
||||
|
||||
void transport_slave_init(void) {
|
||||
i2c_slave_init(SLAVE_I2C_ADDRESS);
|
||||
}
|
||||
|
||||
#else // USE_SERIAL
|
||||
|
||||
#include "serial.h"
|
||||
|
||||
|
||||
|
||||
volatile Serial_s2m_buffer_t serial_s2m_buffer = {};
|
||||
volatile Serial_m2s_buffer_t serial_m2s_buffer = {};
|
||||
uint8_t volatile status0 = 0;
|
||||
|
||||
SSTD_t transactions[] = {
|
||||
{ (uint8_t *)&status0,
|
||||
sizeof(serial_m2s_buffer), (uint8_t *)&serial_m2s_buffer,
|
||||
sizeof(serial_s2m_buffer), (uint8_t *)&serial_s2m_buffer
|
||||
}
|
||||
};
|
||||
|
||||
uint8_t slave_layer_cache;
|
||||
uint8_t slave_nlock_cache;
|
||||
uint8_t slave_clock_cache;
|
||||
uint8_t slave_slock_cache;
|
||||
|
||||
void transport_master_init(void)
|
||||
{ soft_serial_initiator_init(transactions, TID_LIMIT(transactions)); }
|
||||
|
||||
void transport_slave_init(void)
|
||||
{
|
||||
soft_serial_target_init(transactions, TID_LIMIT(transactions));
|
||||
slave_layer_cache = 255;
|
||||
slave_nlock_cache = 255;
|
||||
slave_clock_cache = 255;
|
||||
slave_slock_cache = 255;
|
||||
}
|
||||
|
||||
bool transport_master(matrix_row_t matrix[]) {
|
||||
|
||||
if (soft_serial_transaction()) {
|
||||
return false;
|
||||
}
|
||||
|
||||
// TODO: if MATRIX_COLS > 8 change to unpack()
|
||||
for (int i = 0; i < ROWS_PER_HAND; ++i) {
|
||||
matrix[i] = serial_s2m_buffer.smatrix[i];
|
||||
}
|
||||
|
||||
#if defined(RGBLIGHT_ENABLE) && defined(RGBLIGHT_SPLIT)
|
||||
// Code to send RGB over serial goes here (not implemented yet)
|
||||
#endif
|
||||
|
||||
#ifdef BACKLIGHT_ENABLE
|
||||
// Write backlight level for slave to read
|
||||
serial_m2s_buffer.backlight_level = backlight_config.enable ? backlight_config.level : 0;
|
||||
#endif
|
||||
|
||||
return true;
|
||||
}
|
||||
|
||||
void transport_slave(matrix_row_t matrix[]) {
|
||||
|
||||
// TODO: if MATRIX_COLS > 8 change to pack()
|
||||
for (int i = 0; i < ROWS_PER_HAND; ++i)
|
||||
{
|
||||
serial_s2m_buffer.smatrix[i] = matrix[i];
|
||||
}
|
||||
#ifdef BACKLIGHT_ENABLE
|
||||
backlight_set(serial_m2s_buffer.backlight_level);
|
||||
#endif
|
||||
#if defined(RGBLIGHT_ENABLE) && defined(RGBLIGHT_SPLIT)
|
||||
// Add serial implementation for RGB here
|
||||
#endif
|
||||
|
||||
if (slave_layer_cache != serial_m2s_buffer.current_layer) {
|
||||
slave_layer_cache = serial_m2s_buffer.current_layer;
|
||||
set_layer_indicators(slave_layer_cache);
|
||||
}
|
||||
|
||||
if (slave_nlock_cache != serial_m2s_buffer.nlock_led) {
|
||||
slave_nlock_cache = serial_m2s_buffer.nlock_led;
|
||||
led_toggle(3, slave_nlock_cache);
|
||||
}
|
||||
if (slave_clock_cache != serial_m2s_buffer.clock_led) {
|
||||
slave_clock_cache = serial_m2s_buffer.clock_led;
|
||||
led_toggle(4, slave_clock_cache);
|
||||
}
|
||||
if (slave_slock_cache != serial_m2s_buffer.slock_led) {
|
||||
slave_slock_cache = serial_m2s_buffer.slock_led;
|
||||
led_toggle(5, slave_slock_cache);
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
#endif
|
||||
@@ -1,42 +0,0 @@
|
||||
#pragma once
|
||||
|
||||
#include <common/matrix.h>
|
||||
|
||||
#define ROWS_PER_HAND (MATRIX_ROWS/2)
|
||||
|
||||
typedef struct _Serial_s2m_buffer_t {
|
||||
// TODO: if MATRIX_COLS > 8 change to uint8_t packed_matrix[] for pack/unpack
|
||||
matrix_row_t smatrix[ROWS_PER_HAND];
|
||||
} Serial_s2m_buffer_t;
|
||||
|
||||
typedef struct _Serial_m2s_buffer_t {
|
||||
#ifdef BACKLIGHT_ENABLE
|
||||
uint8_t backlight_level;
|
||||
#endif
|
||||
#if defined(RGBLIGHT_ENABLE) && defined(RGBLIGHT_SPLIT)
|
||||
rgblight_config_t rgblight_config; //not yet use
|
||||
//
|
||||
// When MCUs on both sides drive their respective RGB LED chains,
|
||||
// it is necessary to synchronize, so it is necessary to communicate RGB information.
|
||||
// In that case, define the RGBLIGHT_SPLIT macro.
|
||||
//
|
||||
// Otherwise, if the master side MCU drives both sides RGB LED chains,
|
||||
// there is no need to communicate.
|
||||
#endif
|
||||
|
||||
uint8_t current_layer;
|
||||
uint8_t nlock_led;
|
||||
uint8_t clock_led;
|
||||
uint8_t slock_led;
|
||||
|
||||
} Serial_m2s_buffer_t;
|
||||
|
||||
extern volatile Serial_s2m_buffer_t serial_s2m_buffer;
|
||||
extern volatile Serial_m2s_buffer_t serial_m2s_buffer;
|
||||
|
||||
void transport_master_init(void);
|
||||
void transport_slave_init(void);
|
||||
|
||||
// returns false if valid data not received from slave
|
||||
bool transport_master(matrix_row_t matrix[]);
|
||||
void transport_slave(matrix_row_t matrix[]);
|
||||
@@ -47,7 +47,7 @@
|
||||
*
|
||||
*/
|
||||
#define MATRIX_ROW_PINS { B0, B1, B2, A15, A10 }
|
||||
#define MATRIX_COL_PINS { A2, A3, A6, B14, B15, A8, A9, A7, B3, B4, C14, C15, C13, B5, B6 }
|
||||
#define MATRIX_COL_PINS { A2, A3, A6, B14, B15, A8, A9, A7, B3, B4, C15, C14, C13, B5, B6 }
|
||||
#define UNUSED_PINS { A0, A1, A9, B7, B8, B9, B10, B11, B12, B13 }
|
||||
#define DIODE_DIRECTION COL2ROW
|
||||
|
||||
|
||||
@@ -37,6 +37,17 @@
|
||||
/* Locking resynchronize hack */
|
||||
#define LOCKING_RESYNC_ENABLE
|
||||
|
||||
/* key combination for command */
|
||||
#define IS_COMMAND() ( \
|
||||
keyboard_report->mods == (MOD_BIT(KC_LSHIFT) | MOD_BIT(KC_RSHIFT)) \
|
||||
)
|
||||
|
||||
#define IS31FL3235A_COUNT 1
|
||||
//#define I2C_DRIVER I2CD1
|
||||
#define I2C1_BANK GPIOB
|
||||
#define I2C1_SCL 8
|
||||
#define I2C1_SDA 9
|
||||
|
||||
/*
|
||||
* Feature disable options
|
||||
* These options are also useful to firmware size reduction.
|
||||
|
||||
@@ -76,7 +76,7 @@
|
||||
* @brief Enables the I2C subsystem.
|
||||
*/
|
||||
#if !defined(HAL_USE_I2C) || defined(__DOXYGEN__)
|
||||
#define HAL_USE_I2C FALSE
|
||||
#define HAL_USE_I2C TRUE
|
||||
#endif
|
||||
|
||||
/**
|
||||
|
||||
@@ -154,7 +154,7 @@
|
||||
/*
|
||||
* I2C driver system settings.
|
||||
*/
|
||||
#define STM32_I2C_USE_I2C1 FALSE
|
||||
#define STM32_I2C_USE_I2C1 TRUE
|
||||
#define STM32_I2C_USE_I2C2 FALSE
|
||||
#define STM32_I2C_BUSY_TIMEOUT 50
|
||||
#define STM32_I2C_I2C1_IRQ_PRIORITY 10
|
||||
|
||||
@@ -17,6 +17,8 @@ DFU_ARGS = -d 0483:df11 -a 0 -s 0x08000000:leave
|
||||
# Build Options
|
||||
# comment out to disable the options.
|
||||
#
|
||||
QWIIC_ENABLE = RGB7SEG
|
||||
|
||||
BACKLIGHT_ENABLE = yes
|
||||
BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000)
|
||||
MOUSEKEY_ENABLE = yes # Mouse keys(+4700)
|
||||
|
||||
@@ -130,6 +130,15 @@
|
||||
*/
|
||||
#define BACKLIGHT_LEVELS 10
|
||||
|
||||
// For the rgb7seg
|
||||
#define IS31FL3235A_COUNT 1
|
||||
/*
|
||||
#define I2C_DRIVER I2CD2
|
||||
#define I2C1_BANK GPIOA
|
||||
#define I2C1_SCL 9
|
||||
#define I2C1_SDA 10
|
||||
*/
|
||||
|
||||
// This is a 7-bit address, that gets left-shifted and bit 0
|
||||
// set to 0 for write, 1 for read (as per I2C protocol)
|
||||
// The address will vary depending on your wiring:
|
||||
@@ -138,6 +147,9 @@
|
||||
// 0b1110101 AD <-> SCL
|
||||
// 0b1110110 AD <-> SDA
|
||||
#define LED_DRIVER_ADDR_1 0b1110100
|
||||
|
||||
/* For the LED driver
|
||||
*/
|
||||
#define I2C1_BANK GPIOB
|
||||
#define I2C1_SCL 8
|
||||
#define I2C1_SDA 9
|
||||
|
||||
@@ -14,7 +14,6 @@
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include "gen1.h"
|
||||
#include "is31fl3731-simple.h"
|
||||
|
||||
void matrix_init_kb(void) {
|
||||
}
|
||||
@@ -23,6 +22,8 @@ void matrix_scan_kb(void) {
|
||||
}
|
||||
|
||||
#ifdef LED_MATRIX_ENABLE
|
||||
#include "is31fl3731-simple.h"
|
||||
|
||||
const is31_led g_is31_leds[LED_DRIVER_LED_COUNT] = {
|
||||
/* Refer to IS31 manual for these locations
|
||||
* driver
|
||||
@@ -102,7 +103,6 @@ const is31_led g_is31_leds[LED_DRIVER_LED_COUNT] = {
|
||||
};
|
||||
|
||||
const led_matrix g_leds[LED_DRIVER_LED_COUNT] = {
|
||||
|
||||
/*{row | col << 4}
|
||||
| LED_ROW_COL(row, col)
|
||||
| | modifier
|
||||
|
||||
@@ -155,7 +155,7 @@
|
||||
* I2C driver system settings.
|
||||
*/
|
||||
#define STM32_I2C_USE_I2C1 TRUE
|
||||
#define STM32_I2C_USE_I2C2 FALSE
|
||||
#define STM32_I2C_USE_I2C2 TRUE
|
||||
#define STM32_I2C_BUSY_TIMEOUT 50
|
||||
#define STM32_I2C_I2C1_IRQ_PRIORITY 10
|
||||
#define STM32_I2C_I2C2_IRQ_PRIORITY 10
|
||||
|
||||
@@ -41,6 +41,9 @@ DFU_ARGS = -d 0483:df11 -a 0 -s 0x08000000:leave
|
||||
# LED Configuration
|
||||
LED_MATRIX_ENABLE = IS31FL3731
|
||||
|
||||
# QWIIC Devices
|
||||
#QWIIC_ENABLE = RGB7SEG
|
||||
|
||||
# Build Options
|
||||
# comment out to disable the options.
|
||||
#
|
||||
|
||||
@@ -28,7 +28,7 @@
|
||||
// The first section contains all of the arguments
|
||||
// The second converts the arguments into a two-dimensional array
|
||||
|
||||
#define LAYOUT_all( \
|
||||
#define LAYOUT( \
|
||||
k00, k01, k02, k03, k04, k05, k06, k07, k50, k51, k52, k53, k54, k56, k57, \
|
||||
k10, k11, k12, k13, k14, k15, k16, k17, k60, k61, k62, k63, k64, k65, k67, \
|
||||
k20, k21, k22, k23, k24, k25, k26, k27, k70, k71, k72, k73, k75, \
|
||||
@@ -47,25 +47,6 @@
|
||||
{ k90, KC_NO, k92, k93, k94, k95, k96, k97 } \
|
||||
}
|
||||
|
||||
#define LAYOUT( \
|
||||
k00, k01, k02, k03, k04, k05, k06, k07, k50, k51, k52, k53, k54, k56, k57, \
|
||||
k10, k11, k12, k13, k14, k15, k16, k17, k60, k61, k62, k63, k64, k65, k67, \
|
||||
k20, k21, k22, k23, k24, k25, k26, k27, k70, k71, k72, k73, k75, \
|
||||
k30, k32, k33, k34, k35, k36, k37, k80, k81, k82, k83, k85, k86, \
|
||||
k40, k41, k42, k45, k46, k90, k92, k93, k94, k95, k96, k97 \
|
||||
) { \
|
||||
{ k00, k01, k02, k03, k04, k05, k06, k07 }, \
|
||||
{ k10, k11, k12, k13, k14, k15, k16, k17 }, \
|
||||
{ k20, k21, k22, k23, k24, k25, k26, k27 }, \
|
||||
{ k30, KC_NO, k32, k33, k34, k35, k36, k37 }, \
|
||||
{ k40, k41, k42, KC_NO, KC_NO, k45, k46, KC_NO }, \
|
||||
{ k50, k51, k52, k53, k54, KC_NO, k56, k57 }, \
|
||||
{ k60, k61, k62, k63, k64, k65, KC_NO, k67 }, \
|
||||
{ k70, k71, k72, k73, KC_NO, k75, KC_NO, KC_NO }, \
|
||||
{ k80, k81, k82, k83, KC_NO, k85, k86, KC_NO }, \
|
||||
{ k90, KC_NO, k92, k93, k94, k95, k96, k97 } \
|
||||
}
|
||||
|
||||
#define LAYOUT_66_ansi( \
|
||||
k00, k01, k02, k03, k04, k05, k06, k07, k50, k51, k52, k53, k54, k56, k57, \
|
||||
k10, k11, k12, k13, k14, k15, k16, k17, k60, k61, k62, k63, k64, k65, k67, \
|
||||
|
||||
@@ -1,44 +0,0 @@
|
||||
/*
|
||||
This is the c configuration file for the keymap
|
||||
|
||||
Copyright 2012 Jun Wako <wakojun@gmail.com>
|
||||
Copyright 2015 Jack Humbert
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#pragma once
|
||||
|
||||
//#define USE_MATRIX_I2C
|
||||
|
||||
/* Select hand configuration */
|
||||
|
||||
#define MASTER_LEFT
|
||||
// #define MASTER_RIGHT
|
||||
// #define EE_HANDS
|
||||
|
||||
#define SSD1306OLED
|
||||
|
||||
#define USE_SERIAL_PD2
|
||||
|
||||
//#define TAPPING_FORCE_HOLD
|
||||
//#define TAPPING_TERM 100
|
||||
|
||||
#undef RGBLED_NUM
|
||||
#define RGBLIGHT_ANIMATIONS
|
||||
#define RGBLED_NUM 27
|
||||
#define RGBLIGHT_LIMIT_VAL 120
|
||||
#define RGBLIGHT_HUE_STEP 10
|
||||
#define RGBLIGHT_SAT_STEP 17
|
||||
#define RGBLIGHT_VAL_STEP 17
|
||||
@@ -1,182 +0,0 @@
|
||||
#include QMK_KEYBOARD_H
|
||||
#include "jarred.h"
|
||||
|
||||
#ifdef PROTOCOL_LUFA
|
||||
#include "lufa.h"
|
||||
#include "split_util.h"
|
||||
#endif
|
||||
#ifdef SSD1306OLED
|
||||
#include "ssd1306.h"
|
||||
#endif
|
||||
|
||||
extern keymap_config_t keymap_config;
|
||||
extern uint8_t is_master;
|
||||
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
//Following line allows macro to read current RGB settings
|
||||
extern rgblight_config_t rgblight_config;
|
||||
#endif
|
||||
|
||||
#define LAYOUT_crkbd_base( \
|
||||
K01, K02, K03, K04, K05, K06, K07, K08, K09, K0A, K0B, K0C, \
|
||||
K11, K12, K13, K14, K15, K16, K17, K18, K19, K1A, K1B, K1C, \
|
||||
K21, K22, K23, K24, K25, K26, K27, K28, K29, K2A, K2B, K2C, \
|
||||
K31, K32, K33, K34, K35, K36 \
|
||||
)
|
||||
|
||||
#define LAYOUT_crkbd_wrapper(...) LAYOUT(__VA_ARGS__)
|
||||
|
||||
#define QWERTY_4_CRKBD KC_LCTL, MO(_LW), KC_SPC, KC_ENT, MO(_LW), KC_RALT
|
||||
|
||||
#define BLANK_4_CRKBD KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[_QW] = LAYOUT_crkbd_wrapper(
|
||||
QWERTY_1_12,
|
||||
QWERTY_2_12,
|
||||
QWERTY_3_12,
|
||||
QWERTY_4_DOX
|
||||
),
|
||||
|
||||
[_LW] = LAYOUT_crkbd_wrapper(
|
||||
LOWER_1_12,
|
||||
LOWER_2_12,
|
||||
LOWER_3_12,
|
||||
LOWER_4_DOX
|
||||
),
|
||||
|
||||
[_NV] = LAYOUT_crkbd_wrapper(
|
||||
NAV_1_12,
|
||||
NAV_2_12,
|
||||
NAV_3_12,
|
||||
NAV_4_DOX
|
||||
),
|
||||
|
||||
[_NP] = LAYOUT_crkbd_wrapper(
|
||||
NUMPAD_1_12,
|
||||
NUMPAD_2_12,
|
||||
NUMPAD_3_12,
|
||||
NUMPAD_4_DOX
|
||||
),
|
||||
|
||||
[_MS] = LAYOUT_crkbd_wrapper(
|
||||
MOUSE_1_12,
|
||||
MOUSE_2_12,
|
||||
MOUSE_3_12,
|
||||
MOUSE_4_DOX
|
||||
)
|
||||
};
|
||||
|
||||
void matrix_init_user(void) {
|
||||
//SSD1306 OLED init, make sure to add #define SSD1306OLED in config.h
|
||||
#ifdef SSD1306OLED
|
||||
iota_gfx_init(!has_usb()); // turns on the display
|
||||
#endif
|
||||
}
|
||||
|
||||
//SSD1306 OLED update loop, make sure to add #define SSD1306OLED in config.h
|
||||
#ifdef SSD1306OLED
|
||||
|
||||
// When add source files to SRC in rules.mk, you can use functions.
|
||||
const char *read_logo(void);
|
||||
void set_keylog(uint16_t keycode, keyrecord_t *record);
|
||||
const char *read_keylog(void);
|
||||
const char *read_keylogs(void);
|
||||
|
||||
char matrix_line_str[24];
|
||||
|
||||
const char *read_layer_state(void) {
|
||||
uint8_t layer = biton32(layer_state);
|
||||
|
||||
strcpy(matrix_line_str, "Layer: ");
|
||||
|
||||
switch (layer)
|
||||
{
|
||||
case _QW:
|
||||
strcat(matrix_line_str, "Default");
|
||||
break;
|
||||
case _LW:
|
||||
strcat(matrix_line_str, "Lower");
|
||||
break;
|
||||
case _NV:
|
||||
strcat(matrix_line_str, "Navigation");
|
||||
break;
|
||||
case _NP:
|
||||
strcat(matrix_line_str, "Adjust");
|
||||
break;
|
||||
case _MS:
|
||||
strcat(matrix_line_str, "Mouse");
|
||||
break;
|
||||
default:
|
||||
sprintf(matrix_line_str + strlen(matrix_line_str), "Unknown (%d)", layer);
|
||||
}
|
||||
|
||||
return matrix_line_str;
|
||||
}
|
||||
|
||||
const char *read_usb_state(void) {
|
||||
|
||||
strcpy(matrix_line_str, "USB : ");
|
||||
|
||||
switch (USB_DeviceState) {
|
||||
case DEVICE_STATE_Unattached:
|
||||
strcat(matrix_line_str, "Unattached");
|
||||
break;
|
||||
case DEVICE_STATE_Suspended:
|
||||
strcat(matrix_line_str, "Suspended");
|
||||
break;
|
||||
case DEVICE_STATE_Configured:
|
||||
strcat(matrix_line_str, "Connected");
|
||||
break;
|
||||
case DEVICE_STATE_Powered:
|
||||
strcat(matrix_line_str, "Powered");
|
||||
break;
|
||||
case DEVICE_STATE_Default:
|
||||
strcat(matrix_line_str, "Default");
|
||||
break;
|
||||
case DEVICE_STATE_Addressed:
|
||||
strcat(matrix_line_str, "Addressed");
|
||||
break;
|
||||
default:
|
||||
strcat(matrix_line_str, "Invalid");
|
||||
}
|
||||
|
||||
return matrix_line_str;
|
||||
}
|
||||
|
||||
void matrix_scan_user(void) {
|
||||
iota_gfx_task();
|
||||
}
|
||||
|
||||
void matrix_render_user(struct CharacterMatrix *matrix) {
|
||||
if (is_master) {
|
||||
matrix_write_ln(matrix, read_layer_state());
|
||||
matrix_write_ln(matrix, read_usb_state());
|
||||
matrix_write_ln(matrix, read_keylogs());
|
||||
} else {
|
||||
matrix_write(matrix, read_logo());
|
||||
}
|
||||
}
|
||||
|
||||
void matrix_update(struct CharacterMatrix *dest, const struct CharacterMatrix *source) {
|
||||
if (memcmp(dest->display, source->display, sizeof(dest->display))) {
|
||||
memcpy(dest->display, source->display, sizeof(dest->display));
|
||||
dest->dirty = true;
|
||||
}
|
||||
}
|
||||
|
||||
void iota_gfx_task_user(void) {
|
||||
struct CharacterMatrix matrix;
|
||||
matrix_clear(&matrix);
|
||||
matrix_render_user(&matrix);
|
||||
matrix_update(&display, &matrix);
|
||||
}
|
||||
#endif//SSD1306OLED
|
||||
|
||||
bool process_record_keymap(uint16_t keycode, keyrecord_t *record) {
|
||||
if (record->event.pressed) {
|
||||
set_keylog(keycode, record);
|
||||
}
|
||||
|
||||
return true;
|
||||
}
|
||||
@@ -1,9 +0,0 @@
|
||||
# Jarred's CRKBD Layout
|
||||
|
||||
Check out [user space readme](../../../../users/jarred/readme.md) for more info
|
||||
|
||||
# Build
|
||||
|
||||
```
|
||||
make crkbd:jarred:avrdude
|
||||
```
|
||||
@@ -1,31 +0,0 @@
|
||||
|
||||
# Build Options
|
||||
# change to "no" to disable the options, or define them in the Makefile in
|
||||
# the appropriate keymap folder that will get included automatically
|
||||
#
|
||||
BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000)
|
||||
MOUSEKEY_ENABLE = no # Mouse keys(+4700)
|
||||
EXTRAKEY_ENABLE = no # Audio control and System control(+450)
|
||||
CONSOLE_ENABLE = no # Console for debug(+400)
|
||||
COMMAND_ENABLE = no # Commands for debug and configuration
|
||||
NKRO_ENABLE = no # Nkey Rollover - if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work
|
||||
BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality
|
||||
MIDI_ENABLE = no # MIDI controls
|
||||
AUDIO_ENABLE = no # Audio output on port C6
|
||||
UNICODE_ENABLE = no # Unicode
|
||||
BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID
|
||||
RGBLIGHT_ENABLE = yes # Enable WS2812 RGB underlight.
|
||||
SWAP_HANDS_ENABLE = no # Enable one-hand typing
|
||||
|
||||
# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE
|
||||
SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend
|
||||
|
||||
# If you want to change the display of OLED, you need to change here
|
||||
SRC += ./lib/glcdfont.c \
|
||||
./lib/rgb_state_reader.c \
|
||||
./lib/logo_reader.c \
|
||||
./lib/keylogger.c \
|
||||
#./lib/layer_state_reader.c \
|
||||
# ./lib/mode_icon_reader.c \
|
||||
# ./lib/host_led_state_reader.c \
|
||||
# ./lib/timelogger.c \
|
||||
@@ -1,16 +0,0 @@
|
||||
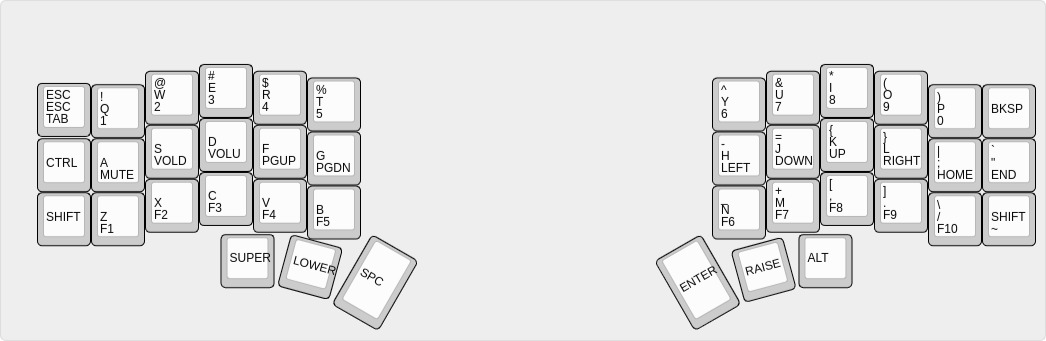
|
||||
|
||||
# Keyboard layout by the-frey
|
||||
|
||||
This is a layout that allows access to all the paren keys easily, has a tab on the lower layer (for SUPER-TAB app switching) and some utility features like PGUP/PGDOWN and HOME/END.
|
||||
|
||||
In addition, the arrows are on the lower layer and are bound to the vim keys (h,j,k,l). I've found this a productive layout for programming in emacs and hopefully you will too.
|
||||
|
||||
The layout image above shows the keymap, with each key marked with all three layers:
|
||||
|
||||
- The top indicates the raise layer
|
||||
- The middle indicates the default layer
|
||||
- The bottom indicates the lower layer
|
||||
|
||||
All the keys respond as you'd expect to the 'shift' key - i.e. on a UK/GB keyboard, `/` becomes `?` and so on.
|
||||
|
||||
@@ -1,45 +0,0 @@
|
||||
/*
|
||||
This is the c configuration file for the keymap
|
||||
|
||||
Copyright 2012 Jun Wako <wakojun@gmail.com>
|
||||
Copyright 2015 Jack Humbert
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#pragma once
|
||||
|
||||
//#define USE_MATRIX_I2C
|
||||
#define FORCE_NKRO
|
||||
|
||||
/* Select hand configuration */
|
||||
|
||||
#define MASTER_LEFT
|
||||
// #define MASTER_RIGHT
|
||||
// #define EE_HANDS
|
||||
|
||||
#define SSD1306OLED
|
||||
|
||||
#define USE_SERIAL_PD2
|
||||
|
||||
#define TAPPING_FORCE_HOLD
|
||||
#define TAPPING_TERM 100
|
||||
|
||||
#undef RGBLED_NUM
|
||||
#define RGBLIGHT_ANIMATIONS
|
||||
#define RGBLED_NUM 27
|
||||
#define RGBLIGHT_LIMIT_VAL 120
|
||||
#define RGBLIGHT_HUE_STEP 10
|
||||
#define RGBLIGHT_SAT_STEP 17
|
||||
#define RGBLIGHT_VAL_STEP 17
|
||||
@@ -1,244 +0,0 @@
|
||||
#include QMK_KEYBOARD_H
|
||||
#include "bootloader.h"
|
||||
#ifdef PROTOCOL_LUFA
|
||||
#include "lufa.h"
|
||||
#include "split_util.h"
|
||||
#endif
|
||||
#ifdef SSD1306OLED
|
||||
#include "ssd1306.h"
|
||||
#endif
|
||||
|
||||
extern keymap_config_t keymap_config;
|
||||
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
//Following line allows macro to read current RGB settings
|
||||
extern rgblight_config_t rgblight_config;
|
||||
#endif
|
||||
|
||||
extern uint8_t is_master;
|
||||
|
||||
// Each layer gets a name for readability, which is then used in the keymap matrix below.
|
||||
// The underscores don't mean anything - you can have a layer called STUFF or any other name.
|
||||
// Layer names don't all need to be of the same length, obviously, and you can also skip them
|
||||
// entirely and just use numbers.
|
||||
#define _QWERTY 0
|
||||
#define _LOWER 3
|
||||
#define _RAISE 4
|
||||
#define _ADJUST 16
|
||||
|
||||
enum custom_keycodes {
|
||||
QWERTY = SAFE_RANGE,
|
||||
LOWER,
|
||||
RAISE,
|
||||
ADJUST,
|
||||
BACKLIT,
|
||||
RGBRST
|
||||
};
|
||||
|
||||
enum macro_keycodes {
|
||||
KC_SAMPLEMACRO,
|
||||
};
|
||||
|
||||
#define KC______ KC_TRNS
|
||||
#define KC_XXXXX KC_NO
|
||||
#define KC_LOWER LOWER
|
||||
#define KC_RAISE RAISE
|
||||
#define KC_RST RESET
|
||||
#define KC_LRST RGBRST
|
||||
#define KC_LTOG RGB_TOG
|
||||
#define KC_LHUI RGB_HUI
|
||||
#define KC_LHUD RGB_HUD
|
||||
#define KC_LSAI RGB_SAI
|
||||
#define KC_LSAD RGB_SAD
|
||||
#define KC_LVAI RGB_VAI
|
||||
#define KC_LVAD RGB_VAD
|
||||
#define KC_LMOD RGB_MOD
|
||||
#define KC_CTLTB CTL_T(KC_TAB)
|
||||
#define KC_GUIEI GUI_T(KC_LANG2)
|
||||
#define KC_ALTKN ALT_T(KC_LANG1)
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[_QWERTY] = LAYOUT_kc( \
|
||||
//,-----------------------------------------. ,-----------------------------------------.
|
||||
ESC, Q, W, E, R, T, Y, U, I, O, P, BSPC,\
|
||||
//|------+------+------+------+------+------| |------+------+------+------+------+------|
|
||||
CTLTB, A, S, D, F, G, H, J, K, L, SCLN, QUOT,\
|
||||
//|------+------+------+------+------+------| |------+------+------+------+------+------|
|
||||
LSFT, Z, X, C, V, B, N, M, COMM, DOT, SLSH, RSFT,\
|
||||
//|------+------+------+------+------+------+------| |------+------+------+------+------+------+------|
|
||||
GUIEI, LOWER, SPC, ENT, RAISE, ALTKN \
|
||||
//`--------------------' `--------------------'
|
||||
),
|
||||
|
||||
[_LOWER] = LAYOUT_kc( \
|
||||
//,-----------------------------------------. ,-----------------------------------------.
|
||||
TAB, 1, 2, 3, 4, 5, 6, 7, 8, 9, 0, BSPC,\
|
||||
//|------+------+------+------+------+------| |------+------+------+------+------+------|
|
||||
CTLTB, MUTE, VOLD, VOLU, PGUP, PGDN, LEFT, DOWN, UP, RIGHT, HOME, END,\
|
||||
//|------+------+------+------+------+------| |------+------+------+------+------+------|
|
||||
LSFT, F1, F2, F3, F4, F5, F6, F7, F8, F9, F10, XXXXX,\
|
||||
//|------+------+------+------+------+------+------| |------+------+------+------+------+------+------|
|
||||
GUIEI, LOWER, SPC, ENT, RAISE, ALTKN \
|
||||
//`--------------------' `--------------------'
|
||||
),
|
||||
|
||||
[_RAISE] = LAYOUT_kc( \
|
||||
//,-----------------------------------------. ,-----------------------------------------.
|
||||
ESC, EXLM, AT, HASH, DLR, PERC, CIRC, AMPR, ASTR, LPRN, RPRN, BSPC,\
|
||||
//|------+------+------+------+------+------| |------+------+------+------+------+------|
|
||||
CTLTB, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, MINS, EQL, LCBR, RCBR, PIPE, GRV,\
|
||||
//|------+------+------+------+------+------| |------+------+------+------+------+------|
|
||||
LSFT, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, UNDS, PLUS, LBRC, RBRC, BSLS, TILD,\
|
||||
//|------+------+------+------+------+------+------| |------+------+------+------+------+------+------|
|
||||
GUIEI, LOWER, SPC, ENT, RAISE, ALTKN \
|
||||
//`--------------------' `--------------------'
|
||||
),
|
||||
|
||||
[_ADJUST] = LAYOUT_kc( \
|
||||
//,-----------------------------------------. ,-----------------------------------------.
|
||||
RST, LRST, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX,\
|
||||
//|------+------+------+------+------+------| |------+------+------+------+------+------|
|
||||
LTOG, LHUI, LSAI, LVAI, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX,\
|
||||
//|------+------+------+------+------+------| |------+------+------+------+------+------|
|
||||
LMOD, LHUD, LSAD, LVAD, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX, XXXXX,\
|
||||
//|------+------+------+------+------+------+------| |------+------+------+------+------+------+------|
|
||||
GUIEI, LOWER, SPC, ENT, RAISE, ALTKN \
|
||||
//`--------------------' `--------------------'
|
||||
)
|
||||
};
|
||||
|
||||
int RGB_current_mode;
|
||||
|
||||
// Setting ADJUST layer RGB back to default
|
||||
void update_tri_layer_RGB(uint8_t layer1, uint8_t layer2, uint8_t layer3) {
|
||||
if (IS_LAYER_ON(layer1) && IS_LAYER_ON(layer2)) {
|
||||
layer_on(layer3);
|
||||
} else {
|
||||
layer_off(layer3);
|
||||
}
|
||||
}
|
||||
|
||||
void matrix_init_user(void) {
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
RGB_current_mode = rgblight_config.mode;
|
||||
#endif
|
||||
//SSD1306 OLED init, make sure to add #define SSD1306OLED in config.h
|
||||
#ifdef SSD1306OLED
|
||||
iota_gfx_init(!has_usb()); // turns on the display
|
||||
#endif
|
||||
}
|
||||
|
||||
//SSD1306 OLED update loop, make sure to add #define SSD1306OLED in config.h
|
||||
#ifdef SSD1306OLED
|
||||
|
||||
// When add source files to SRC in rules.mk, you can use functions.
|
||||
const char *read_layer_state(void);
|
||||
const char *read_logo(void);
|
||||
void set_keylog(uint16_t keycode, keyrecord_t *record);
|
||||
const char *read_keylog(void);
|
||||
const char *read_keylogs(void);
|
||||
|
||||
// const char *read_mode_icon(bool swap);
|
||||
// const char *read_host_led_state(void);
|
||||
// void set_timelog(void);
|
||||
// const char *read_timelog(void);
|
||||
|
||||
void matrix_scan_user(void) {
|
||||
iota_gfx_task();
|
||||
}
|
||||
|
||||
void matrix_render_user(struct CharacterMatrix *matrix) {
|
||||
if (is_master) {
|
||||
// If you want to change the display of OLED, you need to change here
|
||||
matrix_write_ln(matrix, read_layer_state());
|
||||
matrix_write_ln(matrix, read_keylog());
|
||||
matrix_write_ln(matrix, read_keylogs());
|
||||
//matrix_write_ln(matrix, read_mode_icon(keymap_config.swap_lalt_lgui));
|
||||
//matrix_write_ln(matrix, read_host_led_state());
|
||||
//matrix_write_ln(matrix, read_timelog());
|
||||
} else {
|
||||
matrix_write(matrix, read_logo());
|
||||
}
|
||||
}
|
||||
|
||||
void matrix_update(struct CharacterMatrix *dest, const struct CharacterMatrix *source) {
|
||||
if (memcmp(dest->display, source->display, sizeof(dest->display))) {
|
||||
memcpy(dest->display, source->display, sizeof(dest->display));
|
||||
dest->dirty = true;
|
||||
}
|
||||
}
|
||||
|
||||
void iota_gfx_task_user(void) {
|
||||
struct CharacterMatrix matrix;
|
||||
matrix_clear(&matrix);
|
||||
matrix_render_user(&matrix);
|
||||
matrix_update(&display, &matrix);
|
||||
}
|
||||
#endif//SSD1306OLED
|
||||
|
||||
bool process_record_user(uint16_t keycode, keyrecord_t *record) {
|
||||
if (record->event.pressed) {
|
||||
#ifdef SSD1306OLED
|
||||
set_keylog(keycode, record);
|
||||
#endif
|
||||
// set_timelog();
|
||||
}
|
||||
|
||||
switch (keycode) {
|
||||
case QWERTY:
|
||||
if (record->event.pressed) {
|
||||
set_single_persistent_default_layer(_QWERTY);
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
case LOWER:
|
||||
if (record->event.pressed) {
|
||||
layer_on(_LOWER);
|
||||
update_tri_layer_RGB(_LOWER, _RAISE, _ADJUST);
|
||||
} else {
|
||||
layer_off(_LOWER);
|
||||
update_tri_layer_RGB(_LOWER, _RAISE, _ADJUST);
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
case RAISE:
|
||||
if (record->event.pressed) {
|
||||
layer_on(_RAISE);
|
||||
update_tri_layer_RGB(_LOWER, _RAISE, _ADJUST);
|
||||
} else {
|
||||
layer_off(_RAISE);
|
||||
update_tri_layer_RGB(_LOWER, _RAISE, _ADJUST);
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
case ADJUST:
|
||||
if (record->event.pressed) {
|
||||
layer_on(_ADJUST);
|
||||
} else {
|
||||
layer_off(_ADJUST);
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
case RGB_MOD:
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
if (record->event.pressed) {
|
||||
rgblight_mode(RGB_current_mode);
|
||||
rgblight_step();
|
||||
RGB_current_mode = rgblight_config.mode;
|
||||
}
|
||||
#endif
|
||||
return false;
|
||||
break;
|
||||
case RGBRST:
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
if (record->event.pressed) {
|
||||
eeconfig_update_rgblight_default();
|
||||
rgblight_enable();
|
||||
RGB_current_mode = rgblight_config.mode;
|
||||
}
|
||||
#endif
|
||||
break;
|
||||
}
|
||||
return true;
|
||||
}
|
||||
|
||||
@@ -1,31 +0,0 @@
|
||||
|
||||
# Build Options
|
||||
# change to "no" to disable the options, or define them in the Makefile in
|
||||
# the appropriate keymap folder that will get included automatically
|
||||
#
|
||||
BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000)
|
||||
MOUSEKEY_ENABLE = no # Mouse keys(+4700)
|
||||
EXTRAKEY_ENABLE = no # Audio control and System control(+450)
|
||||
CONSOLE_ENABLE = no # Console for debug(+400)
|
||||
COMMAND_ENABLE = no # Commands for debug and configuration
|
||||
NKRO_ENABLE = no # Nkey Rollover - if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work
|
||||
BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality
|
||||
MIDI_ENABLE = no # MIDI controls
|
||||
AUDIO_ENABLE = no # Audio output on port C6
|
||||
UNICODE_ENABLE = no # Unicode
|
||||
BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID
|
||||
RGBLIGHT_ENABLE = yes # Enable WS2812 RGB underlight.
|
||||
SWAP_HANDS_ENABLE = no # Enable one-hand typing
|
||||
|
||||
# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE
|
||||
SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend
|
||||
|
||||
# If you want to change the display of OLED, you need to change here
|
||||
SRC += ./lib/glcdfont.c \
|
||||
./lib/rgb_state_reader.c \
|
||||
./lib/layer_state_reader.c \
|
||||
./lib/logo_reader.c \
|
||||
./lib/keylogger.c \
|
||||
# ./lib/mode_icon_reader.c \
|
||||
# ./lib/host_led_state_reader.c \
|
||||
# ./lib/timelogger.c \
|
||||
@@ -31,5 +31,4 @@
|
||||
#define DRIVER_ADDR_1 0b1010000
|
||||
#define DRIVER_ADDR_2 0b1010000 // this is here for compliancy reasons.
|
||||
#define DRIVER_COUNT 2
|
||||
#define DRIVER_1_LED_TOTAL 63
|
||||
#define DRIVER_LED_TOTAL DRIVER_1_LED_TOTAL
|
||||
|
||||
|
||||
@@ -1,6 +1,4 @@
|
||||
#pragma once
|
||||
#define dzrgb60_ansi
|
||||
#undef DRIVER_1_LED_TOTAL
|
||||
#undef DRIVER_LED_TOTAL
|
||||
#define DRIVER_1_LED_TOTAL 61
|
||||
#define DRIVER_LED_TOTAL DRIVER_1_LED_TOTAL
|
||||
|
||||
@@ -0,0 +1,3 @@
|
||||
#pragma once
|
||||
#define DRIVER_1_LED_TOTAL 63
|
||||
#define DRIVER_LED_TOTAL DRIVER_1_LED_TOTAL
|
||||
@@ -1,6 +1,4 @@
|
||||
#pragma once
|
||||
#define dzrgb60_hhkb
|
||||
#undef DRIVER_1_LED_TOTAL
|
||||
#undef DRIVER_LED_TOTAL
|
||||
#define DRIVER_1_LED_TOTAL 62
|
||||
#define DRIVER_LED_TOTAL DRIVER_1_LED_TOTAL
|
||||
|
||||
@@ -1,6 +1,4 @@
|
||||
#pragma once
|
||||
#define dzrgb60_hhkb_iso
|
||||
#undef DRIVER_1_LED_TOTAL
|
||||
#undef DRIVER_LED_TOTAL
|
||||
#define DRIVER_1_LED_TOTAL 62
|
||||
#define DRIVER_LED_TOTAL DRIVER_1_LED_TOTAL
|
||||
|
||||
@@ -1,6 +1,4 @@
|
||||
#pragma once
|
||||
#define dzrgb60_iso
|
||||
#undef DRIVER_1_LED_TOTAL
|
||||
#undef DRIVER_LED_TOTAL
|
||||
#define DRIVER_1_LED_TOTAL 61
|
||||
#define DRIVER_LED_TOTAL DRIVER_1_LED_TOTAL
|
||||
|
||||
@@ -0,0 +1,3 @@
|
||||
#pragma once
|
||||
#define DRIVER_1_LED_TOTAL 63
|
||||
#define DRIVER_LED_TOTAL DRIVER_1_LED_TOTAL
|
||||
@@ -23,7 +23,7 @@ along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
#define LAYOUT_all( \
|
||||
K61, K71, K72, K73, K74, K64, K65, K75, K76, K77, K78, K68, K66, K10, K60,\
|
||||
K11, K01, K02, K03, K04, K14, K15, K05, K06, K07, K08, K18, K16, K20, \
|
||||
K12, K21, K22, K23, K24, K34, K35, K25, K26, K27, K28, K38, K48, K40, \
|
||||
K12, K21, K22, K23, K24, K34, K35, K25, K26, K27, K28, K38, K40, \
|
||||
K19, K13, K41, K42, K43, K44, K54, K55, K45, K46, K47, K58, K49, K50,\
|
||||
K09, K00, K39, K30, K59, K69, K57, K29\
|
||||
){ \
|
||||
@@ -31,7 +31,7 @@ along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
{ KC_NO, K11, K12, K13, K14, K15, K16, KC_NO, K18, K19, K10}, \
|
||||
{ KC_NO, K21, K22, K23, K24, K25, K26, K27, K28, K29, K20}, \
|
||||
{ KC_NO, KC_NO, KC_NO, KC_NO, K34, K35, KC_NO, KC_NO, K38, K39, K30}, \
|
||||
{ KC_NO, K41, K42, K43, K44, K45, K46, K47, K48, K49, K40}, \
|
||||
{ KC_NO, K41, K42, K43, K44, K45, K46, K47, KC_NO, K49, K40}, \
|
||||
{ KC_NO, KC_NO, KC_NO, KC_NO, K54, K55, KC_NO, K57, K58, K59, K50}, \
|
||||
{ KC_NO, K61, KC_NO, KC_NO, K64, K65, K66, KC_NO, K68, K69, K60}, \
|
||||
{ KC_NO, K71, K72, K73, K74, K75, K76, K77, K78, KC_NO, KC_NO}, \
|
||||
|
||||
@@ -6,7 +6,7 @@
|
||||
"height": 5,
|
||||
"layouts": {
|
||||
"LAYOUT_all": {
|
||||
"layout": [{"label":"~", "x":0, "y":0}, {"label":"!", "x":1, "y":0}, {"label":"@", "x":2, "y":0}, {"label":"#", "x":3, "y":0}, {"label":"$", "x":4, "y":0}, {"label":"%", "x":5, "y":0}, {"label":"^", "x":6, "y":0}, {"label":"&", "x":7, "y":0}, {"label":"*", "x":8, "y":0}, {"label":"(", "x":9, "y":0}, {"label":")", "x":10, "y":0}, {"label":"_", "x":11, "y":0}, {"label":"+", "x":12, "y":0}, {"x":13, "y":0}, {"x":14, "y":0}, {"label":"Tab", "x":0, "y":1, "w":1.5}, {"label":"Q", "x":1.5, "y":1}, {"label":"W", "x":2.5, "y":1}, {"label":"E", "x":3.5, "y":1}, {"label":"R", "x":4.5, "y":1}, {"label":"T", "x":5.5, "y":1}, {"label":"Y", "x":6.5, "y":1}, {"label":"U", "x":7.5, "y":1}, {"label":"I", "x":8.5, "y":1}, {"label":"O", "x":9.5, "y":1}, {"label":"P", "x":10.5, "y":1}, {"label":"{", "x":11.5, "y":1}, {"label":"}", "x":12.5, "y":1}, {"label":"|", "x":13.5, "y":1, "w":1.5}, {"label":"Caps Lock", "x":0, "y":2, "w":1.75}, {"label":"A", "x":1.75, "y":2}, {"label":"S", "x":2.75, "y":2}, {"label":"D", "x":3.75, "y":2}, {"label":"F", "x":4.75, "y":2}, {"label":"G", "x":5.75, "y":2}, {"label":"H", "x":6.75, "y":2}, {"label":"J", "x":7.75, "y":2}, {"label":"K", "x":8.75, "y":2}, {"label":"L", "x":9.75, "y":2}, {"label":":", "x":10.75, "y":2}, {"label":"\"", "x":11.75, "y":2}, {"x":12.75, "y":2}, {"label":"Enter", "x":13.75, "y":2, "w":1.25}, {"label":"Shift", "x":0, "y":3, "w":1.25}, {"x":1.25, "y":3}, {"label":"Z", "x":2.25, "y":3}, {"label":"X", "x":3.25, "y":3}, {"label":"C", "x":4.25, "y":3}, {"label":"V", "x":5.25, "y":3}, {"label":"B", "x":6.25, "y":3}, {"label":"N", "x":7.25, "y":3}, {"label":"M", "x":8.25, "y":3}, {"label":"<", "x":9.25, "y":3}, {"label":">", "x":10.25, "y":3}, {"label":"?", "x":11.25, "y":3}, {"label":"Shift", "x":12.25, "y":3, "w":1.75}, {"x":14, "y":3}, {"label":"Ctrl", "x":0, "y":4, "w":1.25}, {"label":"Win", "x":1.25, "y":4, "w":1.25}, {"label":"Alt", "x":2.5, "y":4, "w":1.25}, {"x":3.75, "y":4, "w":6.25}, {"label":"Alt", "x":10, "y":4, "w":1.25}, {"label":"Win", "x":11.25, "y":4, "w":1.25}, {"label":"Menu", "x":12.5, "y":4, "w":1.25}, {"label":"Ctrl", "x":13.75, "y":4, "w":1.25}]
|
||||
"layout": [{"label":"~", "x":0, "y":0}, {"label":"!", "x":1, "y":0}, {"label":"@", "x":2, "y":0}, {"label":"#", "x":3, "y":0}, {"label":"$", "x":4, "y":0}, {"label":"%", "x":5, "y":0}, {"label":"^", "x":6, "y":0}, {"label":"&", "x":7, "y":0}, {"label":"*", "x":8, "y":0}, {"label":"(", "x":9, "y":0}, {"label":")", "x":10, "y":0}, {"label":"_", "x":11, "y":0}, {"label":"+", "x":12, "y":0}, {"x":13, "y":0}, {"x":14, "y":0}, {"label":"Tab", "x":0, "y":1, "w":1.5}, {"label":"Q", "x":1.5, "y":1}, {"label":"W", "x":2.5, "y":1}, {"label":"E", "x":3.5, "y":1}, {"label":"R", "x":4.5, "y":1}, {"label":"T", "x":5.5, "y":1}, {"label":"Y", "x":6.5, "y":1}, {"label":"U", "x":7.5, "y":1}, {"label":"I", "x":8.5, "y":1}, {"label":"O", "x":9.5, "y":1}, {"label":"P", "x":10.5, "y":1}, {"label":"{", "x":11.5, "y":1}, {"label":"}", "x":12.5, "y":1}, {"label":"|", "x":13.5, "y":1, "w":1.5}, {"label":"Caps Lock", "x":0, "y":2, "w":1.75}, {"label":"A", "x":1.75, "y":2}, {"label":"S", "x":2.75, "y":2}, {"label":"D", "x":3.75, "y":2}, {"label":"F", "x":4.75, "y":2}, {"label":"G", "x":5.75, "y":2}, {"label":"H", "x":6.75, "y":2}, {"label":"J", "x":7.75, "y":2}, {"label":"K", "x":8.75, "y":2}, {"label":"L", "x":9.75, "y":2}, {"label":":", "x":10.75, "y":2}, {"label":"\"", "x":11.75, "y":2}, {"label":"Enter", "x":12.75, "y":2, "w":2.25}, {"label":"Shift", "x":0, "y":3, "w":1.25}, {"x":1.25, "y":3}, {"label":"Z", "x":2.25, "y":3}, {"label":"X", "x":3.25, "y":3}, {"label":"C", "x":4.25, "y":3}, {"label":"V", "x":5.25, "y":3}, {"label":"B", "x":6.25, "y":3}, {"label":"N", "x":7.25, "y":3}, {"label":"M", "x":8.25, "y":3}, {"label":"<", "x":9.25, "y":3}, {"label":">", "x":10.25, "y":3}, {"label":"?", "x":11.25, "y":3}, {"label":"Shift", "x":12.25, "y":3, "w":1.75}, {"x":14, "y":3}, {"label":"Ctrl", "x":0, "y":4, "w":1.25}, {"label":"Win", "x":1.25, "y":4, "w":1.25}, {"label":"Alt", "x":2.5, "y":4, "w":1.25}, {"x":3.75, "y":4, "w":6.25}, {"label":"Alt", "x":10, "y":4, "w":1.25}, {"label":"Win", "x":11.25, "y":4, "w":1.25}, {"label":"Menu", "x":12.5, "y":4, "w":1.25}, {"label":"Ctrl", "x":13.75, "y":4, "w":1.25}]
|
||||
},
|
||||
|
||||
"LAYOUT_60_ansi": {
|
||||
|
||||
@@ -21,21 +21,21 @@ const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[0] = LAYOUT_all(
|
||||
KC_GESC, KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_MINS, KC_EQL, KC_BSLS, KC_GRV,
|
||||
KC_TAB, KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, KC_LBRC, KC_RBRC, KC_BSPC,
|
||||
MO(1), KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT, KC_BSLS, KC_ENT,
|
||||
MO(1), KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT, KC_ENT,
|
||||
KC_LSFT, KC_NO, KC_Z, KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, KC_SLSH, KC_RSFT, MO(1),
|
||||
KC_LCTL, KC_LGUI, KC_LALT, KC_SPACE, KC_RALT, KC_RGUI, KC_MENU, KC_RCTL
|
||||
),
|
||||
[1] = LAYOUT_all(
|
||||
KC_GRV, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11, KC_F12, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_HOME, KC_END, KC_DEL,
|
||||
MO(1), KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_LEFT, KC_DOWN, KC_UP, KC_RIGHT, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
MO(1), KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_LEFT, KC_DOWN, KC_UP, KC_RIGHT, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_PGUP, KC_PGDN, KC_TRNS, KC_TRNS, MO(2),
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS
|
||||
),
|
||||
[2] = LAYOUT_all(
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, RESET,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
MO(1), KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
MO(1), KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS
|
||||
),
|
||||
|
||||
@@ -21,21 +21,21 @@ const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[0] = LAYOUT_all(
|
||||
KC_GESC, KC_1, KC_2, KC_3, KC_4, KC_5, KC_6, KC_7, KC_8, KC_9, KC_0, KC_MINS, KC_EQL, KC_NO, KC_BSPC,
|
||||
KC_TAB, KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, KC_LBRC, KC_RBRC, KC_BSLS,
|
||||
KC_LCTL, KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT, KC_NO, KC_ENT,
|
||||
KC_LCTL, KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, KC_QUOT, KC_ENT,
|
||||
KC_LSFT, KC_NO, KC_Z, KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, KC_SLSH, KC_RSFT, TG(2),
|
||||
KC_LCTL, KC_LGUI, KC_LALT, KC_SPACE, MO(1), KC_RALT, KC_RGUI, KC_RCTL
|
||||
),
|
||||
[1] = LAYOUT_all(
|
||||
KC_GRV, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11, KC_F12, KC_NO, KC_DEL,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_CAPS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_CAPS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
MO(3), KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_MUTE, KC_VOLD, KC_VOLU, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS
|
||||
),
|
||||
[2] = LAYOUT_all(
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_UP, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_LEFT, KC_DOWN, KC_RIGHT
|
||||
),
|
||||
@@ -43,7 +43,7 @@ const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[3] = LAYOUT_all(
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, RESET, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS
|
||||
),
|
||||
|
||||
@@ -1,245 +0,0 @@
|
||||
/*
|
||||
Copyright 2019 Yiancar
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
|
||||
#pragma once
|
||||
|
||||
#include "config_common.h"
|
||||
|
||||
/* USB Device descriptor parameter */
|
||||
#define VENDOR_ID 0x8968
|
||||
#define PRODUCT_ID 0x0001
|
||||
#define DEVICE_VER 0x0001
|
||||
#define MANUFACTURER Yiancar
|
||||
#define PRODUCT Mechboards Micropad
|
||||
#define DESCRIPTION Enjoy your freebie!
|
||||
|
||||
/* key matrix size */
|
||||
#define MATRIX_ROWS 1
|
||||
#define MATRIX_COLS 4
|
||||
|
||||
/*
|
||||
* Keyboard Matrix Assignments
|
||||
*
|
||||
* Change this to how you wired your keyboard
|
||||
* COLS: AVR pins used for columns, left to right
|
||||
* ROWS: AVR pins used for rows, top to bottom
|
||||
* DIODE_DIRECTION: COL2ROW = COL = Anode (+), ROW = Cathode (-, marked on diode)
|
||||
* ROW2COL = ROW = Anode (+), COL = Cathode (-, marked on diode)
|
||||
*
|
||||
*/
|
||||
#define MATRIX_ROW_PINS { B6 }
|
||||
#define MATRIX_COL_PINS { B2, B3, B1, F7 }
|
||||
#define UNUSED_PINS
|
||||
|
||||
/* COL2ROW, ROW2COL*/
|
||||
#define DIODE_DIRECTION COL2ROW
|
||||
|
||||
/*
|
||||
* Split Keyboard specific options, make sure you have 'SPLIT_KEYBOARD = yes' in your rules.mk, and define SOFT_SERIAL_PIN.
|
||||
*/
|
||||
//#define SOFT_SERIAL_PIN D0 // or D1, D2, D3, E6
|
||||
|
||||
// #define BACKLIGHT_PIN B7
|
||||
// #define BACKLIGHT_BREATHING
|
||||
// #define BACKLIGHT_LEVELS 3
|
||||
|
||||
// #define RGB_DI_PIN E2
|
||||
// #ifdef RGB_DI_PIN
|
||||
// #define RGBLED_NUM 16
|
||||
// #define RGBLIGHT_HUE_STEP 8
|
||||
// #define RGBLIGHT_SAT_STEP 8
|
||||
// #define RGBLIGHT_VAL_STEP 8
|
||||
// #define RGBLIGHT_LIMIT_VAL 255 /* The maximum brightness level */
|
||||
// #define RGBLIGHT_SLEEP /* If defined, the RGB lighting will be switched off when the host goes to sleep */
|
||||
// /*== all animations enable ==*/
|
||||
// #define RGBLIGHT_ANIMATIONS
|
||||
// /*== or choose animations ==*/
|
||||
// #define RGBLIGHT_EFFECT_BREATHING
|
||||
// #define RGBLIGHT_EFFECT_RAINBOW_MOOD
|
||||
// #define RGBLIGHT_EFFECT_RAINBOW_SWIRL
|
||||
// #define RGBLIGHT_EFFECT_SNAKE
|
||||
// #define RGBLIGHT_EFFECT_KNIGHT
|
||||
// #define RGBLIGHT_EFFECT_CHRISTMAS
|
||||
// #define RGBLIGHT_EFFECT_STATIC_GRADIENT
|
||||
// #define RGBLIGHT_EFFECT_RGB_TEST
|
||||
// #define RGBLIGHT_EFFECT_ALTERNATING
|
||||
// #endif
|
||||
|
||||
/* Debounce reduces chatter (unintended double-presses) - set 0 if debouncing is not needed */
|
||||
#define DEBOUNCING_DELAY 5
|
||||
|
||||
/* define if matrix has ghost (lacks anti-ghosting diodes) */
|
||||
//#define MATRIX_HAS_GHOST
|
||||
|
||||
/* number of backlight levels */
|
||||
|
||||
/* Mechanical locking support. Use KC_LCAP, KC_LNUM or KC_LSCR instead in keymap */
|
||||
#define LOCKING_SUPPORT_ENABLE
|
||||
/* Locking resynchronize hack */
|
||||
#define LOCKING_RESYNC_ENABLE
|
||||
|
||||
/* If defined, GRAVE_ESC will always act as ESC when CTRL is held.
|
||||
* This is userful for the Windows task manager shortcut (ctrl+shift+esc).
|
||||
*/
|
||||
// #define GRAVE_ESC_CTRL_OVERRIDE
|
||||
|
||||
/*
|
||||
* Force NKRO
|
||||
*
|
||||
* Force NKRO (nKey Rollover) to be enabled by default, regardless of the saved
|
||||
* state in the bootmagic EEPROM settings. (Note that NKRO must be enabled in the
|
||||
* makefile for this to work.)
|
||||
*
|
||||
* If forced on, NKRO can be disabled via magic key (default = LShift+RShift+N)
|
||||
* until the next keyboard reset.
|
||||
*
|
||||
* NKRO may prevent your keystrokes from being detected in the BIOS, but it is
|
||||
* fully operational during normal computer usage.
|
||||
*
|
||||
* For a less heavy-handed approach, enable NKRO via magic key (LShift+RShift+N)
|
||||
* or via bootmagic (hold SPACE+N while plugging in the keyboard). Once set by
|
||||
* bootmagic, NKRO mode will always be enabled until it is toggled again during a
|
||||
* power-up.
|
||||
*
|
||||
*/
|
||||
//#define FORCE_NKRO
|
||||
|
||||
/*
|
||||
* Magic Key Options
|
||||
*
|
||||
* Magic keys are hotkey commands that allow control over firmware functions of
|
||||
* the keyboard. They are best used in combination with the HID Listen program,
|
||||
* found here: https://www.pjrc.com/teensy/hid_listen.html
|
||||
*
|
||||
* The options below allow the magic key functionality to be changed. This is
|
||||
* useful if your keyboard/keypad is missing keys and you want magic key support.
|
||||
*
|
||||
*/
|
||||
|
||||
/* key combination for magic key command */
|
||||
/* defined by default; to change, uncomment and set to the combination you want */
|
||||
// #define IS_COMMAND() (get_mods() == (MOD_BIT(KC_LSHIFT) | MOD_BIT(KC_RSHIFT)))
|
||||
|
||||
/* control how magic key switches layers */
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_FKEYS true
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_NKEYS true
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_CUSTOM false
|
||||
|
||||
/* override magic key keymap */
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_FKEYS
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_NKEYS
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_CUSTOM
|
||||
//#define MAGIC_KEY_HELP H
|
||||
//#define MAGIC_KEY_HELP_ALT SLASH
|
||||
//#define MAGIC_KEY_DEBUG D
|
||||
//#define MAGIC_KEY_DEBUG_MATRIX X
|
||||
//#define MAGIC_KEY_DEBUG_KBD K
|
||||
//#define MAGIC_KEY_DEBUG_MOUSE M
|
||||
//#define MAGIC_KEY_VERSION V
|
||||
//#define MAGIC_KEY_STATUS S
|
||||
//#define MAGIC_KEY_CONSOLE C
|
||||
//#define MAGIC_KEY_LAYER0 0
|
||||
//#define MAGIC_KEY_LAYER0_ALT GRAVE
|
||||
//#define MAGIC_KEY_LAYER1 1
|
||||
//#define MAGIC_KEY_LAYER2 2
|
||||
//#define MAGIC_KEY_LAYER3 3
|
||||
//#define MAGIC_KEY_LAYER4 4
|
||||
//#define MAGIC_KEY_LAYER5 5
|
||||
//#define MAGIC_KEY_LAYER6 6
|
||||
//#define MAGIC_KEY_LAYER7 7
|
||||
//#define MAGIC_KEY_LAYER8 8
|
||||
//#define MAGIC_KEY_LAYER9 9
|
||||
//#define MAGIC_KEY_BOOTLOADER B
|
||||
//#define MAGIC_KEY_BOOTLOADER_ALT ESC
|
||||
//#define MAGIC_KEY_LOCK CAPS
|
||||
//#define MAGIC_KEY_EEPROM E
|
||||
//#define MAGIC_KEY_EEPROM_CLEAR BSPACE
|
||||
//#define MAGIC_KEY_NKRO N
|
||||
//#define MAGIC_KEY_SLEEP_LED Z
|
||||
|
||||
/*
|
||||
* Feature disable options
|
||||
* These options are also useful to firmware size reduction.
|
||||
*/
|
||||
|
||||
/* disable debug print */
|
||||
//#define NO_DEBUG
|
||||
|
||||
/* disable print */
|
||||
//#define NO_PRINT
|
||||
|
||||
/* disable action features */
|
||||
//#define NO_ACTION_LAYER
|
||||
//#define NO_ACTION_TAPPING
|
||||
//#define NO_ACTION_ONESHOT
|
||||
//#define NO_ACTION_MACRO
|
||||
//#define NO_ACTION_FUNCTION
|
||||
|
||||
/*
|
||||
* MIDI options
|
||||
*/
|
||||
|
||||
/* Prevent use of disabled MIDI features in the keymap */
|
||||
//#define MIDI_ENABLE_STRICT 1
|
||||
|
||||
/* enable basic MIDI features:
|
||||
- MIDI notes can be sent when in Music mode is on
|
||||
*/
|
||||
//#define MIDI_BASIC
|
||||
|
||||
/* enable advanced MIDI features:
|
||||
- MIDI notes can be added to the keymap
|
||||
- Octave shift and transpose
|
||||
- Virtual sustain, portamento, and modulation wheel
|
||||
- etc.
|
||||
*/
|
||||
//#define MIDI_ADVANCED
|
||||
|
||||
/* override number of MIDI tone keycodes (each octave adds 12 keycodes and allocates 12 bytes) */
|
||||
//#define MIDI_TONE_KEYCODE_OCTAVES 1
|
||||
|
||||
/*
|
||||
* HD44780 LCD Display Configuration
|
||||
*/
|
||||
/*
|
||||
#define LCD_LINES 2 //< number of visible lines of the display
|
||||
#define LCD_DISP_LENGTH 16 //< visibles characters per line of the display
|
||||
|
||||
#define LCD_IO_MODE 1 //< 0: memory mapped mode, 1: IO port mode
|
||||
|
||||
#if LCD_IO_MODE
|
||||
#define LCD_PORT PORTB //< port for the LCD lines
|
||||
#define LCD_DATA0_PORT LCD_PORT //< port for 4bit data bit 0
|
||||
#define LCD_DATA1_PORT LCD_PORT //< port for 4bit data bit 1
|
||||
#define LCD_DATA2_PORT LCD_PORT //< port for 4bit data bit 2
|
||||
#define LCD_DATA3_PORT LCD_PORT //< port for 4bit data bit 3
|
||||
#define LCD_DATA0_PIN 4 //< pin for 4bit data bit 0
|
||||
#define LCD_DATA1_PIN 5 //< pin for 4bit data bit 1
|
||||
#define LCD_DATA2_PIN 6 //< pin for 4bit data bit 2
|
||||
#define LCD_DATA3_PIN 7 //< pin for 4bit data bit 3
|
||||
#define LCD_RS_PORT LCD_PORT //< port for RS line
|
||||
#define LCD_RS_PIN 3 //< pin for RS line
|
||||
#define LCD_RW_PORT LCD_PORT //< port for RW line
|
||||
#define LCD_RW_PIN 2 //< pin for RW line
|
||||
#define LCD_E_PORT LCD_PORT //< port for Enable line
|
||||
#define LCD_E_PIN 1 //< pin for Enable line
|
||||
#endif
|
||||
*/
|
||||
|
||||
/* Bootmagic Lite key configuration */
|
||||
// #define BOOTMAGIC_LITE_ROW 0
|
||||
// #define BOOTMAGIC_LITE_COLUMN 0
|
||||
@@ -1,12 +0,0 @@
|
||||
{
|
||||
"keyboard_name": "Mechboards Micropad",
|
||||
"url": "",
|
||||
"maintainer": "yiancar",
|
||||
"width": 4,
|
||||
"height": 1,
|
||||
"layouts": {
|
||||
"LAYOUT": {
|
||||
"layout": [{"label":"1", "x":0, "y":0}, {"label":"2", "x":1, "y":0}, {"label":"3", "x":2, "y":0}, {"label":"4", "x":3, "y":0}]
|
||||
}
|
||||
}
|
||||
}
|
||||
@@ -1,84 +0,0 @@
|
||||
/* Copyright 2019 Yiancar
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
uint8_t led_state = 1;
|
||||
|
||||
// Defines the keycodes used by our macros in process_record_user
|
||||
enum custom_keycodes {
|
||||
MECHBOARDURL = SAFE_RANGE,
|
||||
QMKURL,
|
||||
MKUK,
|
||||
LEDCHANGE
|
||||
};
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[0] = LAYOUT( /* Base */
|
||||
MECHBOARDURL, QMKURL, MKUK, LEDCHANGE \
|
||||
),
|
||||
};
|
||||
|
||||
bool process_record_user(uint16_t keycode, keyrecord_t *record) {
|
||||
switch (keycode) {
|
||||
case MECHBOARDURL:
|
||||
if (record->event.pressed) {
|
||||
// when keycode QMKBEST is pressed
|
||||
SEND_STRING("https://mechboards.co.uk/" SS_TAP(X_ENTER));
|
||||
} else {
|
||||
// when keycode QMKBEST is released
|
||||
}
|
||||
break;
|
||||
case QMKURL:
|
||||
if (record->event.pressed) {
|
||||
// when keycode QMKURL is pressed
|
||||
SEND_STRING("https://qmk.fm/" SS_TAP(X_ENTER));
|
||||
} else {
|
||||
// when keycode QMKURL is released
|
||||
}
|
||||
break;
|
||||
case MKUK:
|
||||
if (record->event.pressed) {
|
||||
// when keycode QMKURL is pressed
|
||||
SEND_STRING("MKUK4 was amazing!");
|
||||
} else {
|
||||
// when keycode QMKURL is released
|
||||
}
|
||||
break;
|
||||
case LEDCHANGE:
|
||||
if (record->event.pressed) {
|
||||
// when keycode QMKURL is pressed
|
||||
led_state = !led_state;
|
||||
writePin(F6, led_state);
|
||||
} else {
|
||||
// when keycode QMKURL is released
|
||||
}
|
||||
break;
|
||||
}
|
||||
return true;
|
||||
}
|
||||
|
||||
void matrix_init_user(void) {
|
||||
setPinOutput(F6);
|
||||
writePinLow(F6);
|
||||
}
|
||||
|
||||
void matrix_scan_user(void) {
|
||||
|
||||
}
|
||||
|
||||
void led_set_user(uint8_t usb_led) {
|
||||
|
||||
}
|
||||
@@ -1,4 +0,0 @@
|
||||
# The default keymap for mechboards_micropad
|
||||
|
||||
This is a 4 key micropad freebie from Mechboards and Yiancar-Designs.
|
||||
Press the keys to find out the secrets:)
|
||||
@@ -1,43 +0,0 @@
|
||||
/* Copyright 2019 Yiancar
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include "mechboards_micropad.h"
|
||||
|
||||
void matrix_init_kb(void) {
|
||||
// put your keyboard start-up code here
|
||||
// runs once when the firmware starts up
|
||||
|
||||
matrix_init_user();
|
||||
}
|
||||
|
||||
void matrix_scan_kb(void) {
|
||||
// put your looping keyboard code here
|
||||
// runs every cycle (a lot)
|
||||
|
||||
matrix_scan_user();
|
||||
}
|
||||
|
||||
bool process_record_kb(uint16_t keycode, keyrecord_t *record) {
|
||||
// put your per-action keyboard code here
|
||||
// runs for every action, just before processing by the firmware
|
||||
|
||||
return process_record_user(keycode, record);
|
||||
}
|
||||
|
||||
void led_set_kb(uint8_t usb_led) {
|
||||
// put your keyboard LED indicator (ex: Caps Lock LED) toggling code here
|
||||
|
||||
led_set_user(usb_led);
|
||||
}
|
||||
@@ -1,33 +0,0 @@
|
||||
/* Copyright 2019 Yiancar
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#include "quantum.h"
|
||||
|
||||
/* This a shortcut to help you visually see your layout.
|
||||
*
|
||||
* The first section contains all of the arguments representing the physical
|
||||
* layout of the board and position of the keys.
|
||||
*
|
||||
* The second converts the arguments into a two-dimensional array which
|
||||
* represents the switch matrix.
|
||||
*/
|
||||
#define LAYOUT( \
|
||||
k00, k01, k02, k03 \
|
||||
) \
|
||||
{ \
|
||||
{ k00, k01, k02, k03 } \
|
||||
}
|
||||
@@ -1,14 +0,0 @@
|
||||
Mechboards Micropad
|
||||
===================
|
||||
|
||||
This was a freebie, use me and find out more about me :)
|
||||
|
||||
Keyboard Maintainer: [Yiancar](http://yiancar-designs.com/) and on [github](https://github.com/yiancar)
|
||||
Hardware Supported: ATMega32u4
|
||||
Hardware Availability: Random mechboards.co.uk order and UK meetups!
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
make handwired/mechboards_micropad:default
|
||||
|
||||
See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs).
|
||||
@@ -1,81 +0,0 @@
|
||||
# MCU name
|
||||
#MCU = at90usb1286
|
||||
MCU = atmega32u4
|
||||
|
||||
# Processor frequency.
|
||||
# This will define a symbol, F_CPU, in all source code files equal to the
|
||||
# processor frequency in Hz. You can then use this symbol in your source code to
|
||||
# calculate timings. Do NOT tack on a 'UL' at the end, this will be done
|
||||
# automatically to create a 32-bit value in your source code.
|
||||
#
|
||||
# This will be an integer division of F_USB below, as it is sourced by
|
||||
# F_USB after it has run through any CPU prescalers. Note that this value
|
||||
# does not *change* the processor frequency - it should merely be updated to
|
||||
# reflect the processor speed set externally so that the code can use accurate
|
||||
# software delays.
|
||||
F_CPU = 16000000
|
||||
|
||||
|
||||
#
|
||||
# LUFA specific
|
||||
#
|
||||
# Target architecture (see library "Board Types" documentation).
|
||||
ARCH = AVR8
|
||||
|
||||
# Input clock frequency.
|
||||
# This will define a symbol, F_USB, in all source code files equal to the
|
||||
# input clock frequency (before any prescaling is performed) in Hz. This value may
|
||||
# differ from F_CPU if prescaling is used on the latter, and is required as the
|
||||
# raw input clock is fed directly to the PLL sections of the AVR for high speed
|
||||
# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL'
|
||||
# at the end, this will be done automatically to create a 32-bit value in your
|
||||
# source code.
|
||||
#
|
||||
# If no clock division is performed on the input clock inside the AVR (via the
|
||||
# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU.
|
||||
F_USB = $(F_CPU)
|
||||
|
||||
# Interrupt driven control endpoint task(+60)
|
||||
OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT
|
||||
|
||||
|
||||
# Bootloader selection
|
||||
# Teensy halfkay
|
||||
# Pro Micro caterina
|
||||
# Atmel DFU atmel-dfu
|
||||
# LUFA DFU lufa-dfu
|
||||
# QMK DFU qmk-dfu
|
||||
# atmega32a bootloadHID
|
||||
BOOTLOADER = caterina
|
||||
|
||||
|
||||
# If you don't know the bootloader type, then you can specify the
|
||||
# Boot Section Size in *bytes* by uncommenting out the OPT_DEFS line
|
||||
# Teensy halfKay 512
|
||||
# Teensy++ halfKay 1024
|
||||
# Atmel DFU loader 4096
|
||||
# LUFA bootloader 4096
|
||||
# USBaspLoader 2048
|
||||
# OPT_DEFS += -DBOOTLOADER_SIZE=4096
|
||||
|
||||
|
||||
# Build Options
|
||||
# change yes to no to disable
|
||||
#
|
||||
BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000)
|
||||
MOUSEKEY_ENABLE = yes # Mouse keys(+4700)
|
||||
EXTRAKEY_ENABLE = yes # Audio control and System control(+450)
|
||||
CONSOLE_ENABLE = no # Console for debug(+400)
|
||||
COMMAND_ENABLE = no # Commands for debug and configuration
|
||||
# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE
|
||||
SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend
|
||||
# if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work
|
||||
NKRO_ENABLE = no # USB Nkey Rollover
|
||||
BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality on B7 by default
|
||||
RGBLIGHT_ENABLE = no # Enable keyboard RGB underglow
|
||||
MIDI_ENABLE = no # MIDI support (+2400 to 4200, depending on config)
|
||||
UNICODE_ENABLE = no # Unicode
|
||||
BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID
|
||||
AUDIO_ENABLE = no # Audio output on port C6
|
||||
FAUXCLICKY_ENABLE = no # Use buzzer to emulate clicky switches
|
||||
HD44780_ENABLE = no # Enable support for HD44780 based LCDs (+400)
|
||||
@@ -1,56 +0,0 @@
|
||||
/*
|
||||
Copyright 2019 zk-phi
|
||||
|
||||
This program is free software: you can redistribute it and/or modify
|
||||
it under the terms of the GNU General Public License as published by
|
||||
the Free Software Foundation, either version 2 of the License, or
|
||||
(at your option) any later version.
|
||||
|
||||
This program is distributed in the hope that it will be useful,
|
||||
but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
GNU General Public License for more details.
|
||||
|
||||
You should have received a copy of the GNU General Public License
|
||||
along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#include "config_common.h"
|
||||
|
||||
/* USB Device descriptor parameter */
|
||||
#define VENDOR_ID 0xFEED
|
||||
#define PRODUCT_ID 0x3060
|
||||
#define DEVICE_VER 0x0001
|
||||
#define MANUFACTURER riconken
|
||||
#define PRODUCT hifumi
|
||||
#define DESCRIPTION A macropad with 6 keys
|
||||
|
||||
/* key matrix size */
|
||||
#define MATRIX_ROWS 2
|
||||
#define MATRIX_COLS 3
|
||||
|
||||
/*
|
||||
* Keyboard Matrix Assignments
|
||||
*
|
||||
* Change this to how you wired your keyboard
|
||||
* COLS: AVR pins used for columns, left to right
|
||||
* ROWS: AVR pins used for rows, top to bottom
|
||||
* DIODE_DIRECTION: COL2ROW = COL = Anode (+), ROW = Cathode (-, marked on diode)
|
||||
* ROW2COL = ROW = Anode (+), COL = Cathode (-, marked on diode)
|
||||
*
|
||||
*/
|
||||
#define MATRIX_ROW_PINS { D4, C6 }
|
||||
#define MATRIX_COL_PINS { F4, F5, F6 }
|
||||
#define UNUSED_PINS
|
||||
#define DIODE_DIRECTION COL2ROW
|
||||
|
||||
/* Debounce reduces chatter (unintended double-presses) - set 0 if debouncing is not needed */
|
||||
#define DEBOUNCING_DELAY 5
|
||||
|
||||
/* ws2812 RGB LED */
|
||||
#define RGB_DI_PIN D3
|
||||
#define RGBLED_NUM 6
|
||||
#define RGBLIGHT_LIMIT_VAL 255
|
||||
#define RGBLIGHT_HUE_STEP 5
|
||||
#define RGBLIGHT_ANIMATIONS
|
||||
@@ -1,31 +0,0 @@
|
||||
/* Copyright 2019 zk-phi
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#include "quantum.h"
|
||||
|
||||
// This a shortcut to help you visually see your layout.
|
||||
// The following is an example using the Planck MIT layout
|
||||
// The first section contains all of the arguments
|
||||
// The second converts the arguments into a two-dimensional array
|
||||
#define LAYOUT( \
|
||||
k00, k01, k02, \
|
||||
k10, k11, k12 \
|
||||
) \
|
||||
{ \
|
||||
{ k00, k01, k02 }, \
|
||||
{ k10, k11, k12 } \
|
||||
}
|
||||
@@ -1,12 +0,0 @@
|
||||
{
|
||||
"keyboard_name": "hifumi",
|
||||
"url": "https://github.com/zk-phi/1x2x3-keyboard",
|
||||
"maintainer": "riconken",
|
||||
"width": 3,
|
||||
"height": 2,
|
||||
"layouts": {
|
||||
"LAYOUT": {
|
||||
"layout": [{"label":"F5", "x":0, "y":0}, {"label":"Up", "x":1, "y":0}, {"label":"PrSc", "x":2, "y":0}, {"label":"Left", "x":0, "y":1}, {"label":"Down", "x":1, "y":1}, {"label":"Right", "x":2, "y":1}]
|
||||
}
|
||||
}
|
||||
}
|
||||
@@ -1,47 +0,0 @@
|
||||
/* Copyright 2019 zk-phi
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
//Following line allows macro to read current RGB settings
|
||||
extern rgblight_config_t rgblight_config;
|
||||
#endif
|
||||
|
||||
enum layers {
|
||||
DEFAULT,
|
||||
RAISE,
|
||||
LOWER,
|
||||
ADJUST
|
||||
};
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[DEFAULT] = LAYOUT(
|
||||
LT(RAISE, KC_F5), KC_UP, LT(LOWER, KC_PSCR),
|
||||
KC_LEFT, KC_DOWN, KC_RIGHT
|
||||
),
|
||||
[RAISE] = LAYOUT(
|
||||
_______, KC_PGUP, MO(ADJUST),
|
||||
KC_HOME, KC_PGDN, KC_END
|
||||
),
|
||||
[LOWER] = LAYOUT(
|
||||
MO(ADJUST), _______, _______,
|
||||
_______, _______, _______
|
||||
),
|
||||
[ADJUST] = LAYOUT(
|
||||
_______, RGB_TOG, _______,
|
||||
RGB_MODE_SNAKE, RGB_MODE_PLAIN, RGB_HUI
|
||||
)
|
||||
};
|
||||
@@ -1,32 +0,0 @@
|
||||
/* Copyright 2019 zk-phi
|
||||
*
|
||||
* This program is free software: you can redistribute it and/or modify
|
||||
* it under the terms of the GNU General Public License as published by
|
||||
* the Free Software Foundation, either version 2 of the License, or
|
||||
* (at your option) any later version.
|
||||
*
|
||||
* This program is distributed in the hope that it will be useful,
|
||||
* but WITHOUT ANY WARRANTY; without even the implied warranty of
|
||||
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
||||
* GNU General Public License for more details.
|
||||
*
|
||||
* You should have received a copy of the GNU General Public License
|
||||
* along with this program. If not, see <http://www.gnu.org/licenses/>.
|
||||
*/
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
//Following line allows macro to read current RGB settings
|
||||
extern rgblight_config_t rgblight_config;
|
||||
#endif
|
||||
|
||||
enum layers {
|
||||
DEFAULT
|
||||
};
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[DEFAULT] = LAYOUT(
|
||||
KC_1, KC_2, KC_3,
|
||||
KC_A, KC_B, KC_C
|
||||
)
|
||||
};
|
||||
@@ -1,13 +0,0 @@
|
||||
# hifumi
|
||||
|
||||
A macro pad with 6 keys.
|
||||
|
||||
Keyboard Maintainer: riconken, [zk-phi](https://github.com/zk-phi)
|
||||
Hardware Supported: hifumi PCB, Pro Micro
|
||||
Hardware Availability: [PCB & Case Data](https://github.com/zk-phi/1x2x3-keyboard)
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
make hifumi:default
|
||||
|
||||
See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs).
|
||||
@@ -1,62 +0,0 @@
|
||||
# MCU name
|
||||
#MCU = at90usb1286
|
||||
MCU = atmega32u4
|
||||
|
||||
# Processor frequency.
|
||||
# This will define a symbol, F_CPU, in all source code files equal to the
|
||||
# processor frequency in Hz. You can then use this symbol in your source code to
|
||||
# calculate timings. Do NOT tack on a 'UL' at the end, this will be done
|
||||
# automatically to create a 32-bit value in your source code.
|
||||
#
|
||||
# This will be an integer division of F_USB below, as it is sourced by
|
||||
# F_USB after it has run through any CPU prescalers. Note that this value
|
||||
# does not *change* the processor frequency - it should merely be updated to
|
||||
# reflect the processor speed set externally so that the code can use accurate
|
||||
# software delays.
|
||||
F_CPU = 16000000
|
||||
|
||||
#
|
||||
# LUFA specific
|
||||
#
|
||||
# Target architecture (see library "Board Types" documentation).
|
||||
ARCH = AVR8
|
||||
|
||||
# Input clock frequency.
|
||||
# This will define a symbol, F_USB, in all source code files equal to the
|
||||
# input clock frequency (before any prescaling is performed) in Hz. This value may
|
||||
# differ from F_CPU if prescaling is used on the latter, and is required as the
|
||||
# raw input clock is fed directly to the PLL sections of the AVR for high speed
|
||||
# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL'
|
||||
# at the end, this will be done automatically to create a 32-bit value in your
|
||||
# source code.
|
||||
#
|
||||
# If no clock division is performed on the input clock inside the AVR (via the
|
||||
# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU.
|
||||
F_USB = $(F_CPU)
|
||||
|
||||
# Bootloader
|
||||
# This definition is optional, and if your keyboard supports multiple bootloaders of
|
||||
# different sizes, comment this out, and the correct address will be loaded
|
||||
# automatically (+60). See bootloader.mk for all options.
|
||||
BOOTLOADER = caterina
|
||||
|
||||
# Interrupt driven control endpoint task(+60)
|
||||
OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT
|
||||
|
||||
# Build Options
|
||||
# change to "no" to disable the options, or define them in the Makefile in
|
||||
# the appropriate keymap folder that will get included automatically
|
||||
#
|
||||
BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration(+1000)
|
||||
MOUSEKEY_ENABLE = no # Mouse keys(+4700)
|
||||
EXTRAKEY_ENABLE = no # Audio control and System control(+450)
|
||||
CONSOLE_ENABLE = no # Console for debug(+400)
|
||||
COMMAND_ENABLE = no # Commands for debug and configuration
|
||||
NKRO_ENABLE = no # Nkey Rollover - if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work
|
||||
BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality
|
||||
MIDI_ENABLE = no # MIDI controls
|
||||
AUDIO_ENABLE = no # Audio output on port C6
|
||||
UNICODE_ENABLE = no # Unicode
|
||||
BLUETOOTH_ENABLE = no # Enable Bluetooth with the Adafruit EZ-Key HID
|
||||
RGBLIGHT_ENABLE = yes # Enable WS2812 RGB underlight.
|
||||
SWAP_HANDS_ENABLE = no # Enable one-hand typing
|
||||
@@ -1,78 +0,0 @@
|
||||
#pragma once
|
||||
|
||||
#include "config_common.h"
|
||||
|
||||
/* USB Device descriptor parameter */
|
||||
#define VENDOR_ID 0xFEED
|
||||
#define PRODUCT_ID 0xE11D
|
||||
|
||||
#define DEVICE_VER 0x0001
|
||||
#define MANUFACTURER Z.P.Z.O.
|
||||
#define PRODUCT HotDox
|
||||
#define DESCRIPTION QMK keyboard firmware for HotDox
|
||||
|
||||
/* key matrix size */
|
||||
#define MATRIX_ROWS 6
|
||||
#define MATRIX_COLS 14
|
||||
|
||||
#define MOUSEKEY_INTERVAL 20
|
||||
#define MOUSEKEY_DELAY 0
|
||||
#define MOUSEKEY_TIME_TO_MAX 60
|
||||
#define MOUSEKEY_MAX_SPEED 7
|
||||
#define MOUSEKEY_WHEEL_DELAY 0
|
||||
|
||||
#define TAPPING_TOGGLE 1
|
||||
|
||||
/* define if matrix has ghost */
|
||||
//#define MATRIX_HAS_GHOST
|
||||
|
||||
#define TAPPING_TERM 200
|
||||
#define IGNORE_MOD_TAP_INTERRUPT // this makes it possible to do rolling combos (zx) with keys that convert to other keys on hold (z becomes ctrl when you hold it, and when this option isn't enabled, z rapidly followed by x actually sends Ctrl-x. That's bad.)
|
||||
|
||||
/* Mechanical locking support. Use KC_LCAP, KC_LNUM or KC_LSCR instead in keymap */
|
||||
#define LOCKING_SUPPORT_ENABLE
|
||||
/* Locking resynchronize hack */
|
||||
#define LOCKING_RESYNC_ENABLE
|
||||
|
||||
/* key combination for command */
|
||||
#ifndef IS_COMMAND
|
||||
#define IS_COMMAND() ( \
|
||||
get_mods() == MOD_MASK_CTRL || \
|
||||
get_mods() == MOD_MASK_SHIFT \
|
||||
)
|
||||
#endif
|
||||
|
||||
#define BACKLIGHT_PIN B7
|
||||
/* number of backlight levels */
|
||||
#define BACKLIGHT_LEVELS 3
|
||||
|
||||
#define LED_BRIGHTNESS_LO 15
|
||||
#define LED_BRIGHTNESS_HI 255
|
||||
|
||||
/* fix space cadet rollover issue */
|
||||
#define DISABLE_SPACE_CADET_ROLLOVER
|
||||
|
||||
/* Set 0 if debouncing isn't needed */
|
||||
#define DEBOUNCE 5
|
||||
|
||||
#define USB_MAX_POWER_CONSUMPTION 500
|
||||
|
||||
/*
|
||||
* Feature disable options
|
||||
* These options are also useful to firmware size reduction.
|
||||
*/
|
||||
|
||||
/* disable debug print */
|
||||
// #define NO_DEBUG
|
||||
|
||||
/* disable print */
|
||||
// #define NO_PRINT
|
||||
|
||||
/* disable action features */
|
||||
//#define NO_ACTION_LAYER
|
||||
//#define NO_ACTION_TAPPING
|
||||
//#define NO_ACTION_ONESHOT
|
||||
//#define NO_ACTION_MACRO
|
||||
//#define NO_ACTION_FUNCTION
|
||||
//#define DEBUG_MATRIX_SCAN_RATE
|
||||
|
||||
@@ -1,44 +0,0 @@
|
||||
#include "hotdox.h"
|
||||
#include "backlight.h"
|
||||
#include "quantum.h"
|
||||
|
||||
extern inline void ergodox_board_led_on(void);
|
||||
extern inline void ergodox_right_led_1_on(void);
|
||||
extern inline void ergodox_right_led_2_on(void);
|
||||
extern inline void ergodox_right_led_3_on(void);
|
||||
|
||||
extern inline void ergodox_board_led_off(void);
|
||||
extern inline void ergodox_right_led_1_off(void);
|
||||
extern inline void ergodox_right_led_2_off(void);
|
||||
extern inline void ergodox_right_led_3_off(void);
|
||||
|
||||
extern inline void ergodox_led_all_on(void);
|
||||
extern inline void ergodox_led_all_off(void);
|
||||
|
||||
void ergodox_led_init(void);
|
||||
void ergodox_blink_all_leds(void);
|
||||
|
||||
void matrix_init_kb(void) {
|
||||
ergodox_blink_all_leds();
|
||||
matrix_init_user();
|
||||
}
|
||||
|
||||
void ergodox_blink_all_leds(void)
|
||||
{
|
||||
ergodox_led_all_off();
|
||||
ergodox_led_all_set(LED_BRIGHTNESS_HI);
|
||||
ergodox_right_led_1_on();
|
||||
_delay_ms(50);
|
||||
ergodox_right_led_2_on();
|
||||
_delay_ms(50);
|
||||
ergodox_right_led_3_on();
|
||||
_delay_ms(50);
|
||||
ergodox_right_led_1_off();
|
||||
_delay_ms(50);
|
||||
ergodox_right_led_2_off();
|
||||
_delay_ms(50);
|
||||
ergodox_right_led_3_off();
|
||||
ergodox_led_all_on();
|
||||
_delay_ms(333);
|
||||
ergodox_led_all_off();
|
||||
}
|
||||
@@ -1,187 +0,0 @@
|
||||
#pragma once
|
||||
|
||||
#include "quantum.h"
|
||||
#include <stdint.h>
|
||||
#include <stdbool.h>
|
||||
|
||||
#define CPU_PRESCALE(n) (CLKPR = 0x80, CLKPR = (n))
|
||||
#define CPU_16MHz 0x00
|
||||
|
||||
void init_ergodox(void);
|
||||
|
||||
inline void ergodox_board_led_on(void) { DDRB |= (1<<PB7); PORTB |= (1<<PB7); }
|
||||
inline void ergodox_right_led_1_on(void) { DDRB |= (1<<PB5); PORTB &= ~(1<<PB5); }
|
||||
inline void ergodox_right_led_2_on(void) { DDRB |= (1<<PB6); PORTB &= ~(1<<PB6); }
|
||||
inline void ergodox_right_led_3_on(void) { DDRB |= (1<<PB4); PORTB &= ~(1<<PB4); }
|
||||
|
||||
inline void ergodox_board_led_off(void) { DDRB |= (1<<PB7); PORTB &= ~(1<<PB7); }
|
||||
inline void ergodox_right_led_1_off(void) { DDRB |= (1<<PB5); PORTB |= (1<<PB5); }
|
||||
inline void ergodox_right_led_2_off(void) { DDRB |= (1<<PB6); PORTB |= (1<<PB6); }
|
||||
inline void ergodox_right_led_3_off(void) { DDRB |= (1<<PB4); PORTB |= (1<<PB4); }
|
||||
|
||||
inline void ergodox_right_led_on(uint8_t l) {
|
||||
switch (l) {
|
||||
case 1:
|
||||
ergodox_right_led_1_on();
|
||||
break;
|
||||
case 2:
|
||||
ergodox_right_led_2_on();
|
||||
break;
|
||||
case 3:
|
||||
ergodox_right_led_3_on();
|
||||
break;
|
||||
default:
|
||||
break;
|
||||
}
|
||||
}
|
||||
|
||||
inline void ergodox_right_led_off(uint8_t l) {
|
||||
switch (l) {
|
||||
case 1:
|
||||
ergodox_right_led_1_off();
|
||||
break;
|
||||
case 2:
|
||||
ergodox_right_led_2_off();
|
||||
break;
|
||||
case 3:
|
||||
ergodox_right_led_3_off();
|
||||
break;
|
||||
default:
|
||||
break;
|
||||
}
|
||||
}
|
||||
|
||||
inline void ergodox_led_all_on(void) {
|
||||
ergodox_board_led_on();
|
||||
ergodox_right_led_1_on();
|
||||
ergodox_right_led_2_on();
|
||||
ergodox_right_led_3_on();
|
||||
}
|
||||
|
||||
inline void ergodox_led_all_off(void) {
|
||||
ergodox_board_led_off();
|
||||
ergodox_right_led_1_off();
|
||||
ergodox_right_led_2_off();
|
||||
ergodox_right_led_3_off();
|
||||
}
|
||||
|
||||
inline void ergodox_right_led_1_set(uint8_t n) {}
|
||||
inline void ergodox_right_led_2_set(uint8_t n) {}
|
||||
inline void ergodox_right_led_3_set(uint8_t n) {}
|
||||
inline void ergodox_right_led_set(uint8_t l, uint8_t n) {}
|
||||
inline void ergodox_led_all_set(uint8_t n) {}
|
||||
|
||||
void ergodox_blink_all_leds(void);
|
||||
|
||||
/*
|
||||
* LEFT HAND: LINES 76-83
|
||||
* RIGHT HAND: LINES 85-92
|
||||
*/
|
||||
#define LAYOUT_ergodox( \
|
||||
\
|
||||
k00,k01,k02,k03,k04,k05,k06, \
|
||||
k10,k11,k12,k13,k14,k15,k16, \
|
||||
k20,k21,k22,k23,k24,k25, \
|
||||
k30,k31,k32,k33,k34,k35,k36, \
|
||||
k40,k41,k42,k43,k44, \
|
||||
k55,k56, \
|
||||
k54, \
|
||||
k51,k52,k53, \
|
||||
\
|
||||
k07,k08,k09,k0A,k0B,k0C,k0D, \
|
||||
k17,k18,k19,k1A,k1B,k1C,k1D, \
|
||||
k28,k29,k2A,k2B,k2C,k2D, \
|
||||
k37,k38,k39,k3A,k3B,k3C,k3D, \
|
||||
k49,k4A,k4B,k4C,k4D, \
|
||||
k57,k58, \
|
||||
k59, \
|
||||
k5C,k5B,k5A ) \
|
||||
\
|
||||
/* matrix positions */ \
|
||||
{ \
|
||||
{ k00, k01, k02, k03, k04, k05, k06, k07, k08, k09, k0A, k0B, k0C, k0D }, \
|
||||
{ k10, k11, k12, k13, k14, k15, k16, k17, k18, k19, k1A, k1B, k1C, k1D }, \
|
||||
{ k20, k21, k22, k23, k24, k25, KC_NO, KC_NO, k28, k29, k2A, k2B, k2C, k2D }, \
|
||||
{ k30, k31, k32, k33, k34, k35, k36, k37, k38, k39, k3A, k3B, k3C, k3D }, \
|
||||
{ k40, k41, k42, k43, k44, KC_NO, KC_NO, KC_NO, KC_NO, k49, k4A, k4B, k4C, k4D }, \
|
||||
{ KC_NO, k51, k52, k53, k54, k55, k56, k57, k58, k59, k5A, k5B, k5C, KC_NO } \
|
||||
}
|
||||
|
||||
/*
|
||||
* LEFT HAND: LINES 110-117
|
||||
* RIGHT HAND: LINES 119-126
|
||||
*/
|
||||
#define LAYOUT_ergodox_80( \
|
||||
\
|
||||
k00,k01,k02,k03,k04,k05,k06, \
|
||||
k10,k11,k12,k13,k14,k15,k16, \
|
||||
k20,k21,k22,k23,k24,k25, \
|
||||
k30,k31,k32,k33,k34,k35,k36, \
|
||||
k40,k41,k42,k43,k44, \
|
||||
k55,k56, \
|
||||
k45,k46,k54, \
|
||||
k53,k52,k51, \
|
||||
\
|
||||
k07,k08,k09,k0A,k0B,k0C,k0D, \
|
||||
k17,k18,k19,k1A,k1B,k1C,k1D, \
|
||||
k28,k29,k2A,k2B,k2C,k2D, \
|
||||
k37,k38,k39,k3A,k3B,k3C,k3D, \
|
||||
k49,k4A,k4B,k4C,k4D, \
|
||||
k57,k58, \
|
||||
k59,k47,k48, \
|
||||
k5C,k5B,k5A ) \
|
||||
\
|
||||
/* matrix positions */ \
|
||||
{ \
|
||||
{ k00, k01, k02, k03, k04, k05, k06, k07, k08, k09, k0A, k0B, k0C, k0D }, \
|
||||
{ k10, k11, k12, k13, k14, k15, k16, k17, k18, k19, k1A, k1B, k1C, k1D }, \
|
||||
{ k20, k21, k22, k23, k24, k25, KC_NO, KC_NO, k28, k29, k2A, k2B, k2C, k2D }, \
|
||||
{ k30, k31, k32, k33, k34, k35, k36, k37, k38, k39, k3A, k3B, k3C, k3D }, \
|
||||
{ k40, k41, k42, k43, k44, k45, k45, k47, k48, k49, k4A, k4B, k4C, k4D }, \
|
||||
{ KC_NO, k51, k52, k53, k54, k55, k56, k57, k58, k59, k5A, k5B, k5C, KC_NO } \
|
||||
}
|
||||
|
||||
/* ---------- LEFT HAND ----------- ---------- RIGHT HAND ---------- */
|
||||
#define LAYOUT_ergodox_pretty( \
|
||||
\
|
||||
L00,L01,L02,L03,L04,L05,L06, R00,R01,R02,R03,R04,R05,R06, \
|
||||
L10,L11,L12,L13,L14,L15,L16, R10,R11,R12,R13,R14,R15,R16, \
|
||||
L20,L21,L22,L23,L24,L25, R21,R22,R23,R24,R25,R26, \
|
||||
L30,L31,L32,L33,L34,L35,L36, R30,R31,R32,R33,R34,R35,R36, \
|
||||
L40,L41,L42,L43,L44, R42,R43,R44,R45,R46, \
|
||||
L55,L56, R50,R51, \
|
||||
L54, R52, \
|
||||
L53,L52,L51, R55,R54,R53 ) \
|
||||
\
|
||||
/* matrix positions */ \
|
||||
{ \
|
||||
{ L00,L01,L02,L03,L04,L05,L06, R00,R01,R02,R03,R04,R05,R06 }, \
|
||||
{ L10,L11,L12,L13,L14,L15,L16, R10,R11,R12,R13,R14,R15,R16 }, \
|
||||
{ L20,L21,L22,L23,L24,L25,KC_NO, KC_NO,R21,R22,R23,R24,R25,R26 }, \
|
||||
{ L30,L31,L32,L33,L34,L35,L36, R30,R31,R32,R33,R34,R35,R36 }, \
|
||||
{ L40,L41,L42,L43,L44,KC_NO,KC_NO, KC_NO,KC_NO,R42,R43,R44,R45,R46 }, \
|
||||
{ KC_NO,L51,L52,L53,L54,L55,L56, R50,R51,R52,R53,R54,R55,KC_NO } \
|
||||
}
|
||||
|
||||
/* ---------- LEFT HAND ----------- ---------- RIGHT HAND ---------- */
|
||||
#define LAYOUT_ergodox_pretty_80( \
|
||||
\
|
||||
L00,L01,L02,L03,L04,L05,L06, R00,R01,R02,R03,R04,R05,R06, \
|
||||
L10,L11,L12,L13,L14,L15,L16, R10,R11,R12,R13,R14,R15,R16, \
|
||||
L20,L21,L22,L23,L24,L25, R21,R22,R23,R24,R25,R26, \
|
||||
L30,L31,L32,L33,L34,L35,L36, R30,R31,R32,R33,R34,R35,R36, \
|
||||
L40,L41,L42,L43,L44, R42,R43,R44,R45,R46, \
|
||||
L55,L56, R50,R51, \
|
||||
L45,L46,L54, R52,R40,R41, \
|
||||
L53,L52,L51, R55,R54,R53 ) \
|
||||
\
|
||||
/* matrix positions */ \
|
||||
{ \
|
||||
{ L00,L01,L02,L03,L04,L05,L06, R00,R01,R02,R03,R04,R05,R06 }, \
|
||||
{ L10,L11,L12,L13,L14,L15,L16, R10,R11,R12,R13,R14,R15,R16 }, \
|
||||
{ L20,L21,L22,L23,L24,L25,KC_NO, KC_NO,R21,R22,R23,R24,R25,R26 }, \
|
||||
{ L30,L31,L32,L33,L34,L35,L36, R30,R31,R32,R33,R34,R35,R36 }, \
|
||||
{ L40,L41,L42,L43,L44,L45,L46, R40,R41,R42,R43,R44,R45,R46 }, \
|
||||
{ KC_NO,L51,L52,L53,L54,L55,L56, R50,R51,R52,R53,R54,R55,KC_NO } \
|
||||
}
|
||||
|
||||
@@ -1,107 +0,0 @@
|
||||
{
|
||||
"keyboard_name": "HotDox",
|
||||
"maintainer": "layne001365",
|
||||
"width": 19.5,
|
||||
"height": 9.375,
|
||||
|
||||
"layouts": {
|
||||
"LAYOUT_ergodox": {
|
||||
|
||||
"layout": [
|
||||
{"x":0, "y":0.375, "w":1.5}, {"x":1.5, "y":0.375}, {"x":2.5, "y":0.125}, {"x":3.5, "y":0}, {"x":4.5, "y":0.125}, {"x":5.5, "y":0.25}, {"x":6.5, "y":0.25},
|
||||
{"x":0, "y":1.375, "w":1.5}, {"x":1.5, "y":1.375}, {"x":2.5, "y":1.125}, {"x":3.5, "y":1}, {"x":4.5, "y":1.125}, {"x":5.5, "y":1.25}, {"x":6.5, "y":1.25, "h":1.5},
|
||||
{"x":0, "y":2.375, "w":1.5}, {"x":1.5, "y":2.375}, {"x":2.5, "y":2.125}, {"x":3.5, "y":2}, {"x":4.5, "y":2.125}, {"x":5.5, "y":2.25},
|
||||
{"x":0, "y":3.375, "w":1.5}, {"x":1.5, "y":3.375}, {"x":2.5, "y":3.125}, {"x":3.5, "y":3}, {"x":4.5, "y":3.125}, {"x":5.5, "y":3.25}, {"x":6.5, "y":2.75, "h":1.5},
|
||||
{"x":0.5, "y":4.375}, {"x":1.5, "y":4.375}, {"x":2.5, "y":4.125}, {"x":3.5, "y":4}, {"x":4.5, "y":4.125},
|
||||
|
||||
{"x":6, "y":5}, {"x":7, "y":5},
|
||||
{"x":7, "y":6},
|
||||
{"x":5, "y":6, "h":2}, {"x":6, "y":6, "h":2}, {"x":7, "y":7},
|
||||
|
||||
|
||||
{"x":9.5, "y":0.25}, {"x":10.5, "y":0.25}, {"x":11.5, "y":0.125}, {"x":12.5, "y":0}, {"x":13.5, "y":0.125}, {"x":14.5, "y":0.375}, {"x":15.5, "y":0.375, "w":1.5},
|
||||
{"x":9.5, "y":1.25, "h":1.5}, {"x":10.5, "y":1.25}, {"x":11.5, "y":1.125}, {"x":12.5, "y":1}, {"x":13.5, "y":1.125}, {"x":14.5, "y":1.375}, {"x":15.5, "y":1.375, "w":1.5},
|
||||
{"x":10.5, "y":2.25}, {"x":11.5, "y":2.125}, {"x":12.5, "y":2}, {"x":13.5, "y":2.125}, {"x":14.5, "y":2.375}, {"x":15.5, "y":2.375, "w":1.5},
|
||||
{"x":9.5, "y":2.75, "h":1.5}, {"x":10.5, "y":3.25}, {"x":11.5, "y":3.125}, {"x":12.5, "y":3}, {"x":13.5, "y":3.125}, {"x":14.5, "y":3.375}, {"x":15.5, "y":3.375, "w":1.5},
|
||||
{"x":11.5, "y":4.125}, {"x":12.5, "y":4}, {"x":13.5, "y":4.125}, {"x":14.5, "y":4.375}, {"x":15.5, "y":4.375},
|
||||
|
||||
|
||||
{"x":9, "y":5}, {"x":10, "y":5},
|
||||
{"x":9, "y":6},
|
||||
{"x":9, "y":7}, {"x":10, "y":6, "h":2}, {"x":11, "y":6, "h":2}
|
||||
]
|
||||
},
|
||||
"LAYOUT_ergodox_pretty": {
|
||||
"layout": [
|
||||
{"x":0, "y":0.375, "w":1.5}, {"x":1.5, "y":0.375}, {"x":2.5, "y":0.125}, {"x":3.5, "y":0}, {"x":4.5, "y":0.125}, {"x":5.5, "y":0.25}, {"x":6.5, "y":0.25},
|
||||
{"x":9.5, "y":0.25}, {"x":10.5, "y":0.25}, {"x":11.5, "y":0.125}, {"x":12.5, "y":0}, {"x":13.5, "y":0.125}, {"x":14.5, "y":0.375}, {"x":15.5, "y":0.375, "w":1.5},
|
||||
|
||||
{"x":0, "y":1.375, "w":1.5}, {"x":1.5, "y":1.375}, {"x":2.5, "y":1.125}, {"x":3.5, "y":1}, {"x":4.5, "y":1.125}, {"x":5.5, "y":1.25}, {"x":6.5, "y":1.25, "h":1.5},
|
||||
{"x":9.5, "y":1.25, "h":1.5}, {"x":10.5, "y":1.25}, {"x":11.5, "y":1.125}, {"x":12.5, "y":1}, {"x":13.5, "y":1.125}, {"x":14.5, "y":1.375}, {"x":15.5, "y":1.375, "w":1.5},
|
||||
|
||||
{"x":0, "y":2.375, "w":1.5}, {"x":1.5, "y":2.375}, {"x":2.5, "y":2.125}, {"x":3.5, "y":2}, {"x":4.5, "y":2.125}, {"x":5.5, "y":2.25},
|
||||
{"x":10.5, "y":2.25}, {"x":11.5, "y":2.125}, {"x":12.5, "y":2}, {"x":13.5, "y":2.125}, {"x":14.5, "y":2.375}, {"x":15.5, "y":2.375, "w":1.5},
|
||||
|
||||
{"x":0, "y":3.375, "w":1.5}, {"x":1.5, "y":3.375}, {"x":2.5, "y":3.125}, {"x":3.5, "y":3}, {"x":4.5, "y":3.125}, {"x":5.5, "y":3.25}, {"x":6.5, "y":2.75, "h":1.5},
|
||||
{"x":9.5, "y":2.75, "h":1.5}, {"x":10.5, "y":3.25}, {"x":11.5, "y":3.125}, {"x":12.5, "y":3}, {"x":13.5, "y":3.125}, {"x":14.5, "y":3.375}, {"x":15.5, "y":3.375, "w":1.5},
|
||||
|
||||
{"x":0.5, "y":4.375}, {"x":1.5, "y":4.375}, {"x":2.5, "y":4.125}, {"x":3.5, "y":4}, {"x":4.5, "y":4.125},
|
||||
{"x":11.5, "y":4.125}, {"x":12.5, "y":4}, {"x":13.5, "y":4.125}, {"x":14.5, "y":4.375}, {"x":15.5, "y":4.375},
|
||||
|
||||
{"x":6, "y":5}, {"x":7, "y":5}, {"x":9, "y":5}, {"x":10, "y":5},
|
||||
{"x":7, "y":6}, {"x":9, "y":6},
|
||||
{"x":5, "y":6, "h":2}, {"x":6, "y":6, "h":2}, {"x":7, "y":7}, {"x":9, "y":7}, {"x":10, "y":6, "h":2}, {"x":11, "y":6, "h":2}
|
||||
]
|
||||
},
|
||||
"LAYOUT_ergodox_80": {
|
||||
|
||||
"layout": [
|
||||
{"x":0, "y":0.375, "w":1.5}, {"x":1.5, "y":0.375}, {"x":2.5, "y":0.125}, {"x":3.5, "y":0}, {"x":4.5, "y":0.125}, {"x":5.5, "y":0.25}, {"x":6.5, "y":0.25},
|
||||
{"x":0, "y":1.375, "w":1.5}, {"x":1.5, "y":1.375}, {"x":2.5, "y":1.125}, {"x":3.5, "y":1}, {"x":4.5, "y":1.125}, {"x":5.5, "y":1.25}, {"x":6.5, "y":1.25, "h":1.5},
|
||||
{"x":0, "y":2.375, "w":1.5}, {"x":1.5, "y":2.375}, {"x":2.5, "y":2.125}, {"x":3.5, "y":2}, {"x":4.5, "y":2.125}, {"x":5.5, "y":2.25},
|
||||
{"x":0, "y":3.375, "w":1.5}, {"x":1.5, "y":3.375}, {"x":2.5, "y":3.125}, {"x":3.5, "y":3}, {"x":4.5, "y":3.125}, {"x":5.5, "y":3.25}, {"x":6.5, "y":2.75, "h":1.5},
|
||||
{"x":0.5, "y":4.375}, {"x":1.5, "y":4.375}, {"x":2.5, "y":4.125}, {"x":3.5, "y":4}, {"x":4.5, "y":4.125},
|
||||
|
||||
{"x":6, "y":5}, {"x":7, "y":5},
|
||||
|
||||
{"x":5, "y":6}, {"x":6, "y":6}, {"x":7, "y":6},
|
||||
{"x":5, "y":7}, {"x":6, "y":7}, {"x":7, "y":7},
|
||||
|
||||
|
||||
{"x":9.5, "y":0.25}, {"x":10.5, "y":0.25}, {"x":11.5, "y":0.125}, {"x":12.5, "y":0}, {"x":13.5, "y":0.125}, {"x":14.5, "y":0.375}, {"x":15.5, "y":0.375, "w":1.5},
|
||||
{"x":9.5, "y":1.25, "h":1.5}, {"x":10.5, "y":1.25}, {"x":11.5, "y":1.125}, {"x":12.5, "y":1}, {"x":13.5, "y":1.125}, {"x":14.5, "y":1.375}, {"x":15.5, "y":1.375, "w":1.5},
|
||||
{"x":10.5, "y":2.25}, {"x":11.5, "y":2.125}, {"x":12.5, "y":2}, {"x":13.5, "y":2.125}, {"x":14.5, "y":2.375}, {"x":15.5, "y":2.375, "w":1.5},
|
||||
{"x":9.5, "y":2.75, "h":1.5}, {"x":10.5, "y":3.25}, {"x":11.5, "y":3.125}, {"x":12.5, "y":3}, {"x":13.5, "y":3.125}, {"x":14.5, "y":3.375}, {"x":15.5, "y":3.375, "w":1.5},
|
||||
{"x":11.5, "y":4.125}, {"x":12.5, "y":4}, {"x":13.5, "y":4.125}, {"x":14.5, "y":4.375}, {"x":15.5, "y":4.375},
|
||||
|
||||
|
||||
{"x":9, "y":5}, {"x":10, "y":5},
|
||||
{"x":9, "y":6}, {"x":10, "y":6}, {"x":11, "y":6},
|
||||
{"x":9, "y":7}, {"x":10, "y":7}, {"x":11, "y":7}
|
||||
]
|
||||
},
|
||||
"LAYOUT_ergodox_pretty_80": {
|
||||
|
||||
"layout": [
|
||||
{"x":0, "y":0.375, "w":1.5}, {"x":1.5, "y":0.375}, {"x":2.5, "y":0.125}, {"x":3.5, "y":0}, {"x":4.5, "y":0.125}, {"x":5.5, "y":0.25}, {"x":6.5, "y":0.25},
|
||||
{"x":9.5, "y":0.25}, {"x":10.5, "y":0.25}, {"x":11.5, "y":0.125}, {"x":12.5, "y":0}, {"x":13.5, "y":0.125}, {"x":14.5, "y":0.375}, {"x":15.5, "y":0.375, "w":1.5},
|
||||
|
||||
{"x":0, "y":1.375, "w":1.5}, {"x":1.5, "y":1.375}, {"x":2.5, "y":1.125}, {"x":3.5, "y":1}, {"x":4.5, "y":1.125}, {"x":5.5, "y":1.25}, {"x":6.5, "y":1.25, "h":1.5},
|
||||
{"x":9.5, "y":1.25, "h":1.5}, {"x":10.5, "y":1.25}, {"x":11.5, "y":1.125}, {"x":12.5, "y":1}, {"x":13.5, "y":1.125}, {"x":14.5, "y":1.375}, {"x":15.5, "y":1.375, "w":1.5},
|
||||
|
||||
{"x":0, "y":2.375, "w":1.5}, {"x":1.5, "y":2.375}, {"x":2.5, "y":2.125}, {"x":3.5, "y":2}, {"x":4.5, "y":2.125}, {"x":5.5, "y":2.25},
|
||||
{"x":10.5, "y":2.25}, {"x":11.5, "y":2.125}, {"x":12.5, "y":2}, {"x":13.5, "y":2.125}, {"x":14.5, "y":2.375}, {"x":15.5, "y":2.375, "w":1.5},
|
||||
|
||||
{"x":0, "y":3.375, "w":1.5}, {"x":1.5, "y":3.375}, {"x":2.5, "y":3.125}, {"x":3.5, "y":3}, {"x":4.5, "y":3.125}, {"x":5.5, "y":3.25}, {"x":6.5, "y":2.75, "h":1.5},
|
||||
{"x":9.5, "y":2.75, "h":1.5}, {"x":10.5, "y":3.25}, {"x":11.5, "y":3.125}, {"x":12.5, "y":3}, {"x":13.5, "y":3.125}, {"x":14.5, "y":3.375}, {"x":15.5, "y":3.375, "w":1.5},
|
||||
|
||||
{"x":0.5, "y":4.375}, {"x":1.5, "y":4.375}, {"x":2.5, "y":4.125}, {"x":3.5, "y":4}, {"x":4.5, "y":4.125},
|
||||
{"x":11.5, "y":4.125}, {"x":12.5, "y":4}, {"x":13.5, "y":4.125}, {"x":14.5, "y":4.375}, {"x":15.5, "y":4.375},
|
||||
|
||||
{"x":6, "y":5}, {"x":7, "y":5}, {"x":9, "y":5}, {"x":10, "y":5},
|
||||
{"x":5, "y":6}, {"x":6, "y":6}, {"x":7, "y":6}, {"x":9, "y":6}, {"x":10, "y":6}, {"x":11, "y":6},
|
||||
{"x":5, "y":7}, {"x":6, "y":7}, {"x":7, "y":7}, {"x":9, "y":7}, {"x":10, "y":7}, {"x":11, "y":7}
|
||||
]
|
||||
}
|
||||
}
|
||||
}
|
||||
@@ -1,190 +0,0 @@
|
||||
#include QMK_KEYBOARD_H
|
||||
#include "version.h"
|
||||
|
||||
#define BASE 0 // default layer
|
||||
#define SYMB 1 // symbols
|
||||
#define MDIA 2 // media keys
|
||||
|
||||
enum custom_keycodes {
|
||||
VRSN = SAFE_RANGE,
|
||||
RGB_SLD
|
||||
};
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
/* Keymap 0: Basic layer
|
||||
*
|
||||
* ,--------------------------------------------------. ,--------------------------------------------------.
|
||||
* | = | 1 | 2 | 3 | 4 | 5 | LEFT | | RIGHT| 6 | 7 | 8 | 9 | 0 | - |
|
||||
* |--------+------+------+------+------+-------------| |------+------+------+------+------+------+--------|
|
||||
* | Del | Q | W | E | R | T | L1 | | L1 | Y | U | I | O | P | \ |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | BkSp | A | S | D | F | G |------| |------| H | J | K | L |; / L2|' / Cmd |
|
||||
* |--------+------+------+------+------+------| Hyper| | Meh |------+------+------+------+------+--------|
|
||||
* | LShift |Z/Ctrl| X | C | V | B | | | | N | M | , | . |//Ctrl| RShift |
|
||||
* `--------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* |Grv/L1| '" |AltShf| Left | Right| | Up | Down | [ | ] | ~L1 |
|
||||
* `----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,-------------.
|
||||
* | App | LGui | | Alt |Ctrl/Esc|
|
||||
* ,------|------|------| |------+--------+------.
|
||||
* | | | Home | | PgUp | | |
|
||||
* | Space|Backsp|------| |------| Tab |Enter |
|
||||
* | |ace | End | | PgDn | | |
|
||||
* `--------------------' `----------------------'
|
||||
*/
|
||||
// If it accepts an argument (i.e, is a function), it doesn't need KC_.
|
||||
// Otherwise, it needs KC_*
|
||||
[BASE] = LAYOUT_ergodox( // layer 0 : default
|
||||
// left hand
|
||||
KC_EQL, KC_1, KC_2, KC_3, KC_4, KC_5, KC_LEFT,
|
||||
KC_DELT, KC_Q, KC_W, KC_E, KC_R, KC_T, TG(SYMB),
|
||||
KC_BSPC, KC_A, KC_S, KC_D, KC_F, KC_G,
|
||||
KC_LSFT, CTL_T(KC_Z), KC_X, KC_C, KC_V, KC_B, ALL_T(KC_NO),
|
||||
LT(SYMB,KC_GRV),KC_QUOT, LALT(KC_LSFT), KC_LEFT,KC_RGHT,
|
||||
ALT_T(KC_APP), KC_LGUI,
|
||||
KC_HOME,
|
||||
KC_SPC,KC_BSPC,KC_END,
|
||||
// right hand
|
||||
KC_RGHT, KC_6, KC_7, KC_8, KC_9, KC_0, KC_MINS,
|
||||
//KC_RGHT, KC_6, BL_OFF, BL_ON, BL_INC, BL_DEC, KC_MINS,
|
||||
TG(SYMB), KC_Y, KC_U, KC_I, KC_O, KC_P, KC_BSLS,
|
||||
KC_H, KC_J, KC_K, KC_L, LT(MDIA, KC_SCLN),GUI_T(KC_QUOT),
|
||||
MEH_T(KC_NO),KC_N, KC_M, KC_COMM,KC_DOT, CTL_T(KC_SLSH), KC_RSFT,
|
||||
KC_UP, KC_DOWN,KC_LBRC,KC_RBRC, KC_FN1,
|
||||
KC_LALT, CTL_T(KC_ESC),
|
||||
KC_PGUP,
|
||||
KC_ENT,KC_TAB,KC_PGDN
|
||||
),
|
||||
/* Keymap 1: Symbol Layer
|
||||
*
|
||||
* ,---------------------------------------------------. ,--------------------------------------------------.
|
||||
* |Version | F1 | F2 | F3 | F4 | F5 | | | | F6 | F7 | F8 | F9 | F10 | F11 |
|
||||
* |---------+------+------+------+------+------+------| |------+------+------+------+------+------+--------|
|
||||
* | | ! | @ | { | } | | | | | | Up | 7 | 8 | 9 | * | F12 |
|
||||
* |---------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | # | $ | ( | ) | ` |------| |------| Down | 4 | 5 | 6 | + | |
|
||||
* |---------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | % | ^ | [ | ] | ~ | | | | & | 1 | 2 | 3 | \ | |
|
||||
* `---------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* | EEP_RST | | | | | | | . | 0 | = | |
|
||||
* `-----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,-------------.
|
||||
* |Animat| | |Toggle|Solid |
|
||||
* ,------|------|------| |------+------+------.
|
||||
* |Bright|Bright| | | |Hue- |Hue+ |
|
||||
* |ness- |ness+ |------| |------| | |
|
||||
* | | | | | | | |
|
||||
* `--------------------' `--------------------'
|
||||
*/
|
||||
// SYMBOLS
|
||||
[SYMB] = LAYOUT_ergodox(
|
||||
// left hand
|
||||
VRSN, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_TRNS,
|
||||
KC_TRNS,KC_EXLM,KC_AT, KC_LCBR,KC_RCBR,KC_PIPE,KC_TRNS,
|
||||
KC_TRNS,KC_HASH,KC_DLR, KC_LPRN,KC_RPRN,KC_GRV,
|
||||
KC_TRNS,KC_PERC,KC_CIRC,KC_LBRC,KC_RBRC,KC_TILD,KC_TRNS,
|
||||
EEP_RST,KC_TRNS,KC_TRNS,KC_TRNS,KC_TRNS,
|
||||
RGB_MOD,KC_TRNS,
|
||||
KC_TRNS,
|
||||
RGB_VAD,RGB_VAI,KC_TRNS,
|
||||
// right hand
|
||||
KC_TRNS, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11,
|
||||
KC_TRNS, KC_UP, KC_7, KC_8, KC_9, KC_ASTR, KC_F12,
|
||||
KC_DOWN, KC_4, KC_5, KC_6, KC_PLUS, KC_TRNS,
|
||||
KC_TRNS, KC_AMPR, KC_1, KC_2, KC_3, KC_BSLS, KC_TRNS,
|
||||
KC_TRNS,KC_DOT, KC_0, KC_EQL, KC_TRNS,
|
||||
RGB_TOG, RGB_SLD,
|
||||
KC_TRNS,
|
||||
KC_TRNS, RGB_HUD, RGB_HUI
|
||||
),
|
||||
/* Keymap 2: Media and mouse keys
|
||||
*
|
||||
* ,--------------------------------------------------. ,--------------------------------------------------.
|
||||
* | | | | | | | | | | | | | | | |
|
||||
* |--------+------+------+------+------+-------------| |------+------+------+------+------+------+--------|
|
||||
* | | | | MsUp | | | | | | | | | | | |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | |MsLeft|MsDown|MsRght| |------| |------| | | | | | Play |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | | | | | | | | | | | Prev | Next | | |
|
||||
* `--------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* | | | | Lclk | Rclk | |VolUp |VolDn | Mute | | |
|
||||
* `----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,-------------.
|
||||
* | | | | | |
|
||||
* ,------|------|------| |------+------+------.
|
||||
* | | | | | | |Brwser|
|
||||
* | | |------| |------| |Back |
|
||||
* | | | | | | | |
|
||||
* `--------------------' `--------------------'
|
||||
*/
|
||||
// MEDIA AND MOUSE
|
||||
[MDIA] = LAYOUT_ergodox(
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_MS_U, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_MS_L, KC_MS_D, KC_MS_R, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_BTN1, KC_BTN2,
|
||||
KC_TRNS, KC_TRNS,
|
||||
KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
// right hand
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_MPLY,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_MPRV, KC_MNXT, KC_TRNS, KC_TRNS,
|
||||
KC_VOLU, KC_VOLD, KC_MUTE, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS,
|
||||
KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_WBAK
|
||||
),
|
||||
};
|
||||
|
||||
bool process_record_user(uint16_t keycode, keyrecord_t *record) {
|
||||
switch (keycode) {
|
||||
// dynamically generate these.
|
||||
case VRSN:
|
||||
if (record->event.pressed) {
|
||||
SEND_STRING (QMK_KEYBOARD "/" QMK_KEYMAP " @ " QMK_VERSION);
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
case RGB_SLD:
|
||||
if (record->event.pressed) {
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
rgblight_mode(1);
|
||||
#endif
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
}
|
||||
return true;
|
||||
}
|
||||
|
||||
// Runs just one time when the keyboard initializes.
|
||||
void matrix_init_user(void) {
|
||||
|
||||
};
|
||||
|
||||
|
||||
// Runs constantly in the background, in a loop.
|
||||
void matrix_scan_user(void) {
|
||||
|
||||
uint8_t layer = biton32(layer_state);
|
||||
|
||||
ergodox_right_led_1_off();
|
||||
ergodox_right_led_2_off();
|
||||
ergodox_right_led_3_off();
|
||||
switch (layer) {
|
||||
// TODO: Make this relevant to the ErgoDox EZ.
|
||||
case 1:
|
||||
ergodox_right_led_1_on();
|
||||
break;
|
||||
case 2:
|
||||
ergodox_right_led_2_on();
|
||||
break;
|
||||
default:
|
||||
// none
|
||||
break;
|
||||
}
|
||||
};
|
||||
@@ -1,192 +0,0 @@
|
||||
#include QMK_KEYBOARD_H
|
||||
#include "version.h"
|
||||
|
||||
#define BASE 0 // default layer
|
||||
#define SYMB 1 // symbols
|
||||
#define MDIA 2 // media keys
|
||||
|
||||
enum custom_keycodes {
|
||||
PLACEHOLDER = SAFE_RANGE, // can always be here
|
||||
VRSN,
|
||||
RGB_SLD
|
||||
};
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
/* Keymap 0: Basic layer
|
||||
*
|
||||
* ,--------------------------------------------------. ,--------------------------------------------------.
|
||||
* | Esc | 1 | 2 | 3 | 4 | 5 | ~ | | ' | 6 | 7 | 8 | 9 | 0 | = |
|
||||
* |--------+------+------+------+------+-------------| |------+------+------+------+------+------+--------|
|
||||
* | Del | Q | W | E | R | T | ~ | | " | Y | U | I | O | P | - |
|
||||
* |--------+------+------+------+------+------| ` | | |------+------+------+------+------+--------|
|
||||
* | Ctrl | A | S | D | F | G |------| |------| H | J | K | L | ; | \ |
|
||||
* |--------+------+------+------+------+------| { | | } |------+------+------+------+------+--------|
|
||||
* | LAlt | Z | X | C | V | B | [ | | ] | N | M | , | . | / | LShift |
|
||||
* `--------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* | LT-1 | F4 | F5 | F6 | F11 | | Left | Down | Up | Right| RAlt |
|
||||
* `----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,-------------.
|
||||
* | L1 | Prev | | Vol+ | L2 |
|
||||
* ,------|------|------| |------+--------+------.
|
||||
* | | | Play | | Vol- | | |
|
||||
* | Space|Backsp|------| |------| Tab |Enter |
|
||||
* | |ace | Next | | Mute | | |
|
||||
* `--------------------' `----------------------'
|
||||
*/
|
||||
// If it accepts an argument (i.e, is a function), it doesn't need KC_.
|
||||
// Otherwise, it needs KC_*
|
||||
[BASE] = LAYOUT_ergodox( // layer 0 : default
|
||||
// left hand
|
||||
KC_ESC, KC_1, KC_2, KC_3, KC_4, KC_5, LSFT(KC_GRV),
|
||||
KC_DELT, KC_Q, KC_W, KC_E, KC_R, KC_T, KC_GRV,
|
||||
KC_LCTL, KC_A, KC_S, KC_D, KC_F, KC_G,
|
||||
KC_LALT, KC_Z, KC_X, KC_C, KC_V, KC_B, KC_LBRC,
|
||||
LT(SYMB, KC_F2), KC_F4, KC_F5, KC_F6, KC_F11,
|
||||
TG(SYMB), KC_MPRV,
|
||||
KC_MPLY,
|
||||
KC_SPC,KC_BSPC,KC_MNXT,
|
||||
// right hand
|
||||
KC_QUOT, KC_6, KC_7, KC_8, KC_9, KC_0, KC_EQL,
|
||||
LSFT(KC_QUOT), KC_Y, KC_U, KC_I, KC_O, KC_P, KC_MINS,
|
||||
KC_H, KC_J, KC_K, KC_L, LT(MDIA, KC_SCLN),KC_BSLS,
|
||||
KC_RBRC, KC_N, KC_M, KC_COMM,KC_DOT, KC_SLSH, KC_LSFT,
|
||||
KC_LEFT,KC_DOWN,KC_UP, KC_RGHT,KC_RALT,
|
||||
KC_VOLU, TG(MDIA),
|
||||
KC_VOLD,
|
||||
KC_MUTE,KC_TAB, KC_ENT
|
||||
),
|
||||
/* Keymap 1: Symbol Layer
|
||||
*
|
||||
* ,---------------------------------------------------. ,--------------------------------------------------.
|
||||
* |Version | F1 | F2 | F3 | F4 | F5 | | | | F6 | F7 | F8 | F9 | F10 | F11 |
|
||||
* |---------+------+------+------+------+------+------| |------+------+------+------+------+------+--------|
|
||||
* | | ! | @ | { | } | | | | | | Up | 7 | 8 | 9 | * | F12 |
|
||||
* |---------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | # | $ | ( | ) | ` |------| |------| Down | 4 | 5 | 6 | + | |
|
||||
* |---------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | % | ^ | [ | ] | ~ | | | | & | 1 | 2 | 3 | \ | |
|
||||
* `---------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* | EEP_RST | | | | | | | . | 0 | = | |
|
||||
* `-----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,-------------.
|
||||
* |Animat| | |Toggle|Solid |
|
||||
* ,------|------|------| |------+------+------.
|
||||
* |Bright|Bright| | | |Hue- |Hue+ |
|
||||
* |ness- |ness+ |------| |------| | |
|
||||
* | | | | | | | |
|
||||
* `--------------------' `--------------------'
|
||||
*/
|
||||
// SYMBOLS
|
||||
[SYMB] = LAYOUT_ergodox(
|
||||
// left hand
|
||||
VRSN, KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, KC_TRNS,
|
||||
KC_TRNS,KC_EXLM,KC_AT, KC_LCBR,KC_RCBR,KC_PIPE,KC_TRNS,
|
||||
KC_TRNS,KC_HASH,KC_DLR, KC_LPRN,KC_RPRN,KC_GRV,
|
||||
KC_TRNS,KC_PERC,KC_CIRC,KC_LBRC,KC_RBRC,KC_TILD,KC_TRNS,
|
||||
EEP_RST,KC_TRNS,KC_TRNS,KC_TRNS,KC_TRNS,
|
||||
RGB_MOD,KC_TRNS,
|
||||
KC_TRNS,
|
||||
RGB_VAD,RGB_VAI,KC_TRNS,
|
||||
// right hand
|
||||
KC_TRNS, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_F11,
|
||||
KC_TRNS, KC_UP, KC_7, KC_8, KC_9, KC_ASTR, KC_F12,
|
||||
KC_DOWN, KC_4, KC_5, KC_6, KC_PLUS, KC_TRNS,
|
||||
KC_TRNS, KC_AMPR, KC_1, KC_2, KC_3, KC_BSLS, KC_TRNS,
|
||||
KC_TRNS,KC_DOT, KC_0, KC_EQL, KC_TRNS,
|
||||
RGB_TOG, RGB_SLD,
|
||||
KC_TRNS,
|
||||
KC_TRNS, RGB_HUD, RGB_HUI
|
||||
),
|
||||
/* Keymap 2: Media and mouse keys
|
||||
*
|
||||
* ,--------------------------------------------------. ,--------------------------------------------------.
|
||||
* | | | | | | | | | | | | | | | |
|
||||
* |--------+------+------+------+------+-------------| |------+------+------+------+------+------+--------|
|
||||
* | | | | MsUp | | | | | | | | | | | |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | |MsLeft|MsDown|MsRght| |------| |------| | | | | | Play |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | | | | | | | | | | | Prev | Next | | |
|
||||
* `--------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* | | | | Lclk | Rclk | |VolUp |VolDn | Mute | | |
|
||||
* `----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,-------------.
|
||||
* | | | | | |
|
||||
* ,------|------|------| |------+------+------.
|
||||
* | | | | | | |Brwser|
|
||||
* | | |------| |------| |Back |
|
||||
* | | | | | | | |
|
||||
* `--------------------' `--------------------'
|
||||
*/
|
||||
// MEDIA AND MOUSE
|
||||
[MDIA] = LAYOUT_ergodox(
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_MS_U, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_MS_L, KC_MS_D, KC_MS_R, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_BTN1, KC_BTN2,
|
||||
KC_TRNS, KC_TRNS,
|
||||
KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
// right hand
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_TRNS, KC_MPLY,
|
||||
KC_TRNS, KC_TRNS, KC_TRNS, KC_MPRV, KC_MNXT, KC_TRNS, KC_TRNS,
|
||||
KC_VOLU, KC_VOLD, KC_MUTE, KC_TRNS, KC_TRNS,
|
||||
KC_TRNS, KC_TRNS,
|
||||
KC_TRNS,
|
||||
KC_TRNS, KC_TRNS, KC_WBAK
|
||||
),
|
||||
};
|
||||
|
||||
bool process_record_user(uint16_t keycode, keyrecord_t *record) {
|
||||
switch (keycode) {
|
||||
// dynamically generate these.
|
||||
case VRSN:
|
||||
if (record->event.pressed) {
|
||||
SEND_STRING (QMK_KEYBOARD "/" QMK_KEYMAP " @ " QMK_VERSION);
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
case RGB_SLD:
|
||||
if (record->event.pressed) {
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
rgblight_mode(1);
|
||||
#endif
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
}
|
||||
return true;
|
||||
}
|
||||
|
||||
// Runs just one time when the keyboard initializes.
|
||||
void matrix_init_user(void) {
|
||||
|
||||
};
|
||||
|
||||
|
||||
// Runs constantly in the background, in a loop.
|
||||
void matrix_scan_user(void) {
|
||||
|
||||
uint8_t layer = biton32(layer_state);
|
||||
|
||||
ergodox_board_led_off();
|
||||
ergodox_right_led_1_off();
|
||||
ergodox_right_led_2_off();
|
||||
ergodox_right_led_3_off();
|
||||
switch (layer) {
|
||||
// TODO: Make this relevant to the ErgoDox EZ.
|
||||
case 1:
|
||||
ergodox_right_led_1_on();
|
||||
break;
|
||||
case 2:
|
||||
ergodox_right_led_2_on();
|
||||
break;
|
||||
default:
|
||||
// none
|
||||
break;
|
||||
}
|
||||
|
||||
};
|
||||
@@ -1,210 +0,0 @@
|
||||
#include QMK_KEYBOARD_H
|
||||
#include "version.h"
|
||||
|
||||
#define BASE 0 // default layer
|
||||
#define QW 1 // qwerty
|
||||
#define SYMB 2 // symbols
|
||||
#define NUM 3 // media keys
|
||||
|
||||
enum custom_keycodes {
|
||||
PLACEHOLDER = SAFE_RANGE, // can always be here
|
||||
VRSN,
|
||||
RGB_SLD
|
||||
};
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
/* Keymap 0: Basic layer
|
||||
*
|
||||
* ,--------------------------------------------------. ,--------------------------------------------------.
|
||||
* | Esc | 1 | 2 | 3 | 4 | 5 | SHIFT| | SYM | 6 | 7 | 8 | 9 | 0 | Bck |
|
||||
* |--------+------+------+------+------+-------------| |------+------+------+------+------+------+--------|
|
||||
* | Tab | Q | D | R | W | B | `~ | | "' | J | F | U | P | : | \ | |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | Ctr/Es | A | S | H | T | G |------| |------| Y | N | E | O | I | Enter |
|
||||
* |--------+------+------+------+------+------| = + | | -_ |------+------+------+------+------+--------|
|
||||
* | LShift | Z | X | M | C | V | | | | K | L | , | . | / | RShift |
|
||||
* `--------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* |MEH | Gui |AltShf| Left | Right| | DOWN | UP | [ | ] | ~SYM |
|
||||
* `----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,-------------.
|
||||
* | ESC |Home | | PgUp | QW |
|
||||
* ,------|------|------| |------+--------+------.
|
||||
* | | ENT | End | | PgDn | | |
|
||||
* | Space| WIN |------| |------| Tab |Back |
|
||||
* | SYM | | SCTR | | SALT | SYM | |
|
||||
* `--------------------' `----------------------'
|
||||
*/
|
||||
|
||||
[BASE] = LAYOUT_ergodox( // layer 0 : default
|
||||
// left hand
|
||||
KC_ESC, KC_1, KC_2, KC_3, KC_4, KC_5, KC_LSFT,
|
||||
KC_TAB, KC_Q, KC_D, KC_R, KC_W, KC_B, KC_GRV,
|
||||
CTL_T(KC_ESC), KC_A, KC_S, KC_H, KC_T, KC_G,
|
||||
KC_LSFT, KC_Z, KC_X, KC_M, KC_C, KC_V, KC_EQL,
|
||||
KC_MEH, KC_LGUI, KC_LALT, KC_LEFT,KC_RGHT,
|
||||
KC_ESC, KC_HOME,
|
||||
KC_END,
|
||||
LT(SYMB, KC_SPC), LGUI_T(KC_ENT), S(KC_LGUI),
|
||||
// right hand
|
||||
TG(NUM), KC_6, KC_7, KC_8, KC_9, KC_0, KC_BSPC,
|
||||
KC_QUOT, KC_J, KC_F, KC_U, KC_P, KC_SCLN, KC_BSLS,
|
||||
KC_Y, KC_N, KC_E, KC_O, KC_I , KC_ENT,
|
||||
KC_MINS, KC_K, KC_L, KC_COMM,KC_DOT, KC_SLSH, KC_RSFT,
|
||||
KC_DOWN,KC_UP, KC_LBRC,KC_RBRC, MO(SYMB),
|
||||
KC_PGUP, TG(QW),
|
||||
KC_PGDN,
|
||||
S(KC_LALT),LT(SYMB, KC_TAB), KC_BSPC
|
||||
),
|
||||
|
||||
[QW] = LAYOUT_ergodox(
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, KC_Q, KC_W, KC_E, KC_R, KC_T, _______,
|
||||
_______, KC_A, KC_S, KC_D, KC_F, KC_G,
|
||||
_______, KC_Z, KC_X, KC_C, KC_V, KC_B, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______,
|
||||
// right hand
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, KC_Y, KC_U, KC_I , KC_O, KC_P, _______,
|
||||
KC_H, KC_J, KC_K , KC_L, KC_SCLN, _______,
|
||||
_______, KC_N, KC_M, KC_COMM, KC_DOT, KC_SLSH, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______
|
||||
),
|
||||
/* Keymap 1: Symbol Layer
|
||||
*
|
||||
* ,---------------------------------------------------. ,--------------------------------------------------.
|
||||
* | | F1 | F2 | F3 | F4 | F5 | | | | F6 | F7 | F8 | F9 | F10 | DEL |
|
||||
* |---------+------+------+------+------+------+------| |------+------+------+------+------+------+--------|
|
||||
* | | ! | @ | { | } | * | | | | < | H | U | PU | * | |
|
||||
* |---------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | # | $ | ( | ) | ` |------| |------| > | L | D | R | + | |
|
||||
* |---------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | % | ^ | [ | ] | ~ | | | | & | E | D | PD | \ | |
|
||||
* `---------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* | | | | | | | | | | | |
|
||||
* `-----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,-------------.
|
||||
* | | | | | |
|
||||
* ,------|------|------| |------+------+------.
|
||||
* | | | | | | | |
|
||||
* | | |------| |------| | |
|
||||
* | | | | | | | |
|
||||
* `--------------------' `--------------------'
|
||||
*/
|
||||
// SYMBOLS
|
||||
[SYMB] = LAYOUT_ergodox(
|
||||
// left hand
|
||||
_______,KC_F1, KC_F2, KC_F3, KC_F4, KC_F5, _______,
|
||||
_______,KC_EXLM,KC_AT, KC_LCBR,KC_RCBR,KC_ASTR,_______,
|
||||
_______,KC_HASH,KC_DLR, KC_LPRN,KC_RPRN,KC_GRV,
|
||||
_______,KC_PERC,KC_CIRC,KC_LBRC,KC_RBRC,KC_TILD,_______,
|
||||
_______,_______,_______,_______,_______,
|
||||
_______,_______,
|
||||
_______,
|
||||
_______,_______,_______,
|
||||
// right hand
|
||||
_______, KC_F6, KC_F7, KC_F8, KC_F9, KC_F10, KC_DEL,
|
||||
_______, KC_LABK, KC_HOME, KC_UP, KC_PGUP, KC_ASTR, _______,
|
||||
KC_RABK, KC_LEFT, KC_DOWN, KC_RIGHT, KC_PLUS, _______,
|
||||
_______, KC_AMPR, KC_END, KC_DOWN, KC_PGDN, KC_BSLS, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______
|
||||
),
|
||||
/* Keymap 2: Media and mouse keys
|
||||
*
|
||||
* ,--------------------------------------------------. ,--------------------------------------------------.
|
||||
* | | | | | | | | | | | | | | | |
|
||||
* |--------+------+------+------+------+-------------| |------+------+------+------+------+------+--------|
|
||||
* | | | L | MsUp | R | | | | | | 4 | 5 | 6 | | TAB |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | |MsLeft|MsDown|MsRght| |------| |------| | 1 | 2 | 3 | | |
|
||||
* |--------+------+------+------+------+------| | | |------+------+------+------+------+--------|
|
||||
* | | | | | | | | | | | | 0 | 0 | | |
|
||||
* `--------+------+------+------+------+-------------' `-------------+------+------+------+------+--------'
|
||||
* | | | | | | | | | | | |
|
||||
* `----------------------------------' `----------------------------------'
|
||||
* ,-------------. ,-------------.
|
||||
* | | | | | |
|
||||
* ,------|------|------| |------+------+------.
|
||||
* | | | | | | | |
|
||||
* | | |------| |------| | |
|
||||
* | | | | | | | |
|
||||
* `--------------------' `--------------------'
|
||||
*/
|
||||
[NUM] = LAYOUT_ergodox(
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, KC_BTN1, KC_MS_U, KC_BTN2, _______, _______,
|
||||
_______, _______, KC_MS_L, KC_MS_D, KC_MS_R, _______,
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______,
|
||||
// right hand
|
||||
_______, _______, _______, _______, _______, _______, _______,
|
||||
_______, _______, KC_4, KC_5 , KC_6, _______, KC_TAB,
|
||||
_______, KC_1, KC_2 , KC_3, _______, _______,
|
||||
_______, _______, _______, KC_0, KC_0, _______, _______,
|
||||
_______, _______, _______, _______, _______,
|
||||
_______, _______,
|
||||
_______,
|
||||
_______, _______, _______
|
||||
),
|
||||
};
|
||||
|
||||
bool process_record_user(uint16_t keycode, keyrecord_t *record) {
|
||||
switch (keycode) {
|
||||
// dynamically generate these.
|
||||
case VRSN:
|
||||
if (record->event.pressed) {
|
||||
SEND_STRING (QMK_KEYBOARD "/" QMK_KEYMAP " @ " QMK_VERSION);
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
case RGB_SLD:
|
||||
if (record->event.pressed) {
|
||||
#ifdef RGBLIGHT_ENABLE
|
||||
rgblight_mode(1);
|
||||
#endif
|
||||
}
|
||||
return false;
|
||||
break;
|
||||
}
|
||||
return true;
|
||||
}
|
||||
|
||||
// Runs just one time when the keyboard initializes.
|
||||
void matrix_init_user(void) {
|
||||
|
||||
};
|
||||
|
||||
|
||||
// Runs constantly in the background, in a loop.
|
||||
void matrix_scan_user(void) {
|
||||
|
||||
uint8_t layer = biton32(layer_state);
|
||||
|
||||
ergodox_board_led_off();
|
||||
ergodox_right_led_1_off();
|
||||
ergodox_right_led_2_off();
|
||||
ergodox_right_led_3_off();
|
||||
switch (layer) {
|
||||
case 1:
|
||||
ergodox_board_led_on();
|
||||
break;
|
||||
case 3:
|
||||
ergodox_board_led_on();
|
||||
break;
|
||||
default:
|
||||
// none
|
||||
break;
|
||||
}
|
||||
|
||||
};
|
||||
@@ -1,130 +0,0 @@
|
||||
#include "action.h"
|
||||
#include "left.h"
|
||||
#include "wait.h"
|
||||
|
||||
bool i2c_initialized = false;
|
||||
|
||||
void left_config(void);
|
||||
uint8_t left_write(uint8_t reg, uint8_t data);
|
||||
uint8_t left_read(uint8_t reg, uint8_t *data);
|
||||
|
||||
uint8_t init_mcp23017(void)
|
||||
{
|
||||
i2c_initialized = false;
|
||||
|
||||
if (i2c_initialized == 0)
|
||||
{
|
||||
i2c_init(); // on pins D(1,0)
|
||||
_delay_ms(1000);
|
||||
}
|
||||
|
||||
return 0;
|
||||
}
|
||||
void left_init(void)
|
||||
{
|
||||
init_mcp23017();
|
||||
left_scan();
|
||||
#if 0
|
||||
while (1)
|
||||
{
|
||||
print("wait\n");
|
||||
wait_us(1000000);
|
||||
}
|
||||
#endif
|
||||
}
|
||||
|
||||
void left_scan(void)
|
||||
{
|
||||
uint8_t ret = i2c_start(I2C_ADDR_WRITE, HOTDOX_I2C_TIMEOUT);
|
||||
|
||||
if (ret == 0)
|
||||
{
|
||||
i2c_stop(HOTDOX_I2C_TIMEOUT);
|
||||
|
||||
if (!i2c_initialized)
|
||||
{
|
||||
i2c_initialized = true;
|
||||
left_config();
|
||||
clear_keyboard();
|
||||
print("mcp23017 attached!!!\n");
|
||||
}
|
||||
}
|
||||
else
|
||||
{
|
||||
if (i2c_initialized)
|
||||
{
|
||||
i2c_initialized = false;
|
||||
clear_keyboard();
|
||||
print("mcp23017 deattached!!!\n");
|
||||
}
|
||||
}
|
||||
|
||||
return;
|
||||
}
|
||||
|
||||
uint8_t left_read_cols(void)
|
||||
{
|
||||
uint8_t data = 0;
|
||||
|
||||
left_read(MCP23017_B0_GPIOA, &data);
|
||||
|
||||
return data;
|
||||
}
|
||||
|
||||
void left_unselect_rows(void)
|
||||
{
|
||||
left_write(MCP23017_B0_IODIRB, 0x3F);
|
||||
}
|
||||
|
||||
void left_select_row(uint8_t row)
|
||||
{
|
||||
left_write(MCP23017_B0_IODIRB, ~(1 << row));
|
||||
}
|
||||
|
||||
void left_config(void)
|
||||
{
|
||||
left_write(MCP23017_B0_IODIRA, 0x7F);
|
||||
left_write(MCP23017_B0_IPOLA, 0x7F);
|
||||
left_write(MCP23017_B0_GPPUA, 0x7F);
|
||||
|
||||
left_write(MCP23017_B0_IODIRB, 0xFF);
|
||||
left_write(MCP23017_B0_GPIOB, 0xC0);
|
||||
}
|
||||
|
||||
uint8_t left_write(uint8_t reg, uint8_t data)
|
||||
{
|
||||
if (!i2c_initialized)
|
||||
{
|
||||
return 0;
|
||||
}
|
||||
|
||||
uint8_t ret;
|
||||
|
||||
ret = i2c_start(I2C_ADDR_WRITE, HOTDOX_I2C_TIMEOUT); if (ret) goto out;
|
||||
ret = i2c_write(reg, HOTDOX_I2C_TIMEOUT); if (ret) goto out;
|
||||
ret = i2c_write(data, HOTDOX_I2C_TIMEOUT);
|
||||
|
||||
out:
|
||||
i2c_stop(HOTDOX_I2C_TIMEOUT);
|
||||
return ret;
|
||||
}
|
||||
|
||||
uint8_t left_read(uint8_t reg, uint8_t *data)
|
||||
{
|
||||
if (!i2c_initialized)
|
||||
{
|
||||
return 0;
|
||||
}
|
||||
|
||||
uint8_t ret = 0;
|
||||
|
||||
ret = i2c_start(I2C_ADDR_WRITE, HOTDOX_I2C_TIMEOUT); if (ret) goto out;
|
||||
ret = i2c_write(reg, HOTDOX_I2C_TIMEOUT); if (ret) goto out;
|
||||
ret = i2c_start(I2C_ADDR_READ, HOTDOX_I2C_TIMEOUT); if (ret) goto out;
|
||||
|
||||
*data = i2c_read_nack(HOTDOX_I2C_TIMEOUT);
|
||||
|
||||
out:
|
||||
i2c_stop(HOTDOX_I2C_TIMEOUT);
|
||||
return ret;
|
||||
}
|
||||
@@ -1,57 +0,0 @@
|
||||
#pragma once
|
||||
|
||||
#include "quantum.h"
|
||||
#include <stdint.h>
|
||||
#include "i2c_master.h"
|
||||
#include <util/delay.h>
|
||||
|
||||
#define MCP23017
|
||||
#define MCP23017_A0 0
|
||||
#define MCP23017_A1 0
|
||||
#define MCP23017_A2 0
|
||||
|
||||
#define I2C_ADDR (0x20)
|
||||
#define I2C_ADDR_WRITE ((I2C_ADDR << 1) | I2C_WRITE)
|
||||
#define I2C_ADDR_READ ((I2C_ADDR << 1) | I2C_READ)
|
||||
|
||||
|
||||
#define MCP23017_B0_IODIRA 0x00
|
||||
#define MCP23017_B0_IODIRB 0x01
|
||||
#define MCP23017_B0_IPOLA 0x02
|
||||
#define MCP23017_B0_IPOLB 0x03
|
||||
#define MCP23017_B0_GPINTENA 0x04
|
||||
#define MCP23017_B0_GPINTENB 0x05
|
||||
#define MCP23017_B0_DEFVALA 0x06
|
||||
#define MCP23017_B0_DEFVALB 0x07
|
||||
#define MCP23017_B0_INTCONA 0x08
|
||||
#define MCP23017_B0_INTCONB 0x09
|
||||
#define MCP23017_B0_IOCONA 0x0A
|
||||
#define MCP23017_B0_IOCONB 0x0B
|
||||
#define MCP23017_B0_GPPUA 0x0C
|
||||
#define MCP23017_B0_GPPUB 0x0D
|
||||
#define MCP23017_B0_INTFA 0x0E
|
||||
#define MCP23017_B0_INTFB 0x0F
|
||||
#define MCP23017_B0_INTCAPA 0x10
|
||||
#define MCP23017_B0_INTCAPB 0x11
|
||||
#define MCP23017_B0_GPIOA 0x12
|
||||
#define MCP23017_B0_GPIOB 0x13
|
||||
#define MCP23017_B0_OLATA 0x14
|
||||
#define MCP23017_B0_OLATB 0x15
|
||||
|
||||
#define HOTDOX_I2C_TIMEOUT 100
|
||||
|
||||
typedef int16_t i2c_status_t;
|
||||
|
||||
void left_init(void);
|
||||
void left_scan(void);
|
||||
|
||||
uint8_t left_read_cols(void);
|
||||
uint8_t left_get_col(uint8_t col);
|
||||
|
||||
matrix_row_t left_read_row(void);
|
||||
|
||||
void left_unselect_rows(void);
|
||||
void left_select_row(uint8_t row);
|
||||
|
||||
uint8_t init_mcp23017(void);
|
||||
|
||||
@@ -1,283 +0,0 @@
|
||||
#include <stdint.h>
|
||||
#include <stdbool.h>
|
||||
#include <avr/io.h>
|
||||
#include "wait.h"
|
||||
#include "action_layer.h"
|
||||
#include "print.h"
|
||||
#include "debug.h"
|
||||
#include "util.h"
|
||||
#include "matrix.h"
|
||||
#include "hotdox.h"
|
||||
#include "left.h"
|
||||
#ifdef DEBUG_MATRIX_SCAN_RATE
|
||||
#include "timer.h"
|
||||
#endif
|
||||
|
||||
/*
|
||||
* This constant define not debouncing time in msecs, but amount of matrix
|
||||
* scan loops which should be made to get stable debounced results.
|
||||
*
|
||||
* On Ergodox matrix scan rate is relatively low, because of slow I2C.
|
||||
* Now it's only 317 scans/second, or about 3.15 msec/scan.
|
||||
* According to Cherry specs, debouncing time is 5 msec.
|
||||
*
|
||||
* And so, there is no sense to have DEBOUNCE higher than 2.
|
||||
*/
|
||||
|
||||
#ifndef DEBOUNCE
|
||||
# define DEBOUNCE 5
|
||||
#endif
|
||||
|
||||
/* matrix state(1:on, 0:off) */
|
||||
static matrix_row_t matrix[MATRIX_ROWS];
|
||||
|
||||
// Debouncing: store for each key the number of scans until it's eligible to
|
||||
// change. When scanning the matrix, ignore any changes in keys that have
|
||||
// already changed in the last DEBOUNCE scans.
|
||||
static uint8_t debounce_matrix[MATRIX_ROWS * MATRIX_COLS];
|
||||
|
||||
static matrix_row_t read_cols(uint8_t row);
|
||||
static void init_cols(void);
|
||||
static void unselect_rows(void);
|
||||
static void select_row(uint8_t row);
|
||||
|
||||
#ifdef DEBUG_MATRIX_SCAN_RATE
|
||||
uint32_t matrix_timer;
|
||||
uint32_t matrix_scan_count;
|
||||
#endif
|
||||
|
||||
|
||||
__attribute__ ((weak))
|
||||
void matrix_init_user(void) {}
|
||||
|
||||
__attribute__ ((weak))
|
||||
void matrix_scan_user(void) {}
|
||||
|
||||
__attribute__ ((weak))
|
||||
void matrix_init_kb(void) {
|
||||
matrix_init_user();
|
||||
}
|
||||
|
||||
__attribute__ ((weak))
|
||||
void matrix_scan_kb(void) {
|
||||
matrix_scan_user();
|
||||
}
|
||||
|
||||
inline
|
||||
uint8_t matrix_rows(void)
|
||||
{
|
||||
return MATRIX_ROWS;
|
||||
}
|
||||
|
||||
inline
|
||||
uint8_t matrix_cols(void)
|
||||
{
|
||||
return MATRIX_COLS;
|
||||
}
|
||||
|
||||
void matrix_init(void)
|
||||
{
|
||||
// disable JTAG
|
||||
MCUCR = (1<<JTD);
|
||||
MCUCR = (1<<JTD);
|
||||
|
||||
unselect_rows();
|
||||
init_cols();
|
||||
|
||||
//eeprom_update_word(EECONFIG_MAGIC, 0x0000);
|
||||
|
||||
// initialize matrix state: all keys off
|
||||
for (uint8_t i=0; i < MATRIX_ROWS; i++) {
|
||||
matrix[i] = 0;
|
||||
for (uint8_t j=0; j < MATRIX_COLS; ++j) {
|
||||
debounce_matrix[i * MATRIX_COLS + j] = 0;
|
||||
}
|
||||
}
|
||||
|
||||
#ifdef DEBUG_MATRIX_SCAN_RATE
|
||||
matrix_timer = timer_read32();
|
||||
matrix_scan_count = 0;
|
||||
#endif
|
||||
|
||||
matrix_init_quantum();
|
||||
|
||||
}
|
||||
|
||||
void matrix_power_up(void) {
|
||||
unselect_rows();
|
||||
init_cols();
|
||||
|
||||
// initialize matrix state: all keys off
|
||||
for (uint8_t i=0; i < MATRIX_ROWS; i++) {
|
||||
matrix[i] = 0;
|
||||
}
|
||||
|
||||
#ifdef DEBUG_MATRIX_SCAN_RATE
|
||||
matrix_timer = timer_read32();
|
||||
matrix_scan_count = 0;
|
||||
#endif
|
||||
}
|
||||
|
||||
// Returns a matrix_row_t whose bits are set if the corresponding key should be
|
||||
// eligible to change in this scan.
|
||||
matrix_row_t debounce_mask(uint8_t row) {
|
||||
matrix_row_t result = 0;
|
||||
for (uint8_t j=0; j < MATRIX_COLS; ++j) {
|
||||
if (debounce_matrix[row * MATRIX_COLS + j]) {
|
||||
--debounce_matrix[row * MATRIX_COLS + j];
|
||||
} else {
|
||||
result |= (1 << j);
|
||||
}
|
||||
}
|
||||
return result;
|
||||
}
|
||||
|
||||
// Report changed keys in the given row. Resets the debounce countdowns
|
||||
// corresponding to each set bit in 'change' to DEBOUNCE.
|
||||
void debounce_report(matrix_row_t change, uint8_t row) {
|
||||
for (uint8_t i = 0; i < MATRIX_COLS; ++i) {
|
||||
if (change & (1 << i)) {
|
||||
debounce_matrix[row * MATRIX_COLS + i] = DEBOUNCE;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
uint8_t matrix_scan(void)
|
||||
{
|
||||
left_scan();
|
||||
|
||||
#ifdef DEBUG_MATRIX_SCAN_RATE
|
||||
matrix_scan_count++;
|
||||
|
||||
uint32_t timer_now = timer_read32();
|
||||
if (TIMER_DIFF_32(timer_now, matrix_timer)>1000) {
|
||||
print("matrix scan frequency: ");
|
||||
pdec(matrix_scan_count);
|
||||
print("\n");
|
||||
matrix_print();
|
||||
|
||||
matrix_timer = timer_now;
|
||||
matrix_scan_count = 0;
|
||||
}
|
||||
#endif
|
||||
for (uint8_t i = 0; i < MATRIX_ROWS; i++) {
|
||||
select_row(i);
|
||||
wait_us(30); // without this wait read unstable value.
|
||||
matrix_row_t mask = debounce_mask(i);
|
||||
matrix_row_t cols = (read_cols(i) & mask) | (matrix[i] & ~mask);
|
||||
debounce_report(cols ^ matrix[i], i);
|
||||
matrix[i] = cols;
|
||||
|
||||
unselect_rows();
|
||||
}
|
||||
|
||||
matrix_scan_quantum();
|
||||
|
||||
return 1;
|
||||
}
|
||||
|
||||
inline
|
||||
bool matrix_is_on(uint8_t row, uint8_t col)
|
||||
{
|
||||
return (matrix[row] & ((matrix_row_t)1<<col));
|
||||
}
|
||||
|
||||
inline
|
||||
matrix_row_t matrix_get_row(uint8_t row)
|
||||
{
|
||||
return matrix[row];
|
||||
}
|
||||
|
||||
void matrix_print(void)
|
||||
{
|
||||
print("\nr/c 0123456789ABCDEF\n");
|
||||
for (uint8_t row = 0; row < MATRIX_ROWS; row++) {
|
||||
phex(row); print(": ");
|
||||
pbin_reverse16(matrix_get_row(row));
|
||||
print("\n");
|
||||
}
|
||||
}
|
||||
|
||||
uint8_t matrix_key_count(void)
|
||||
{
|
||||
uint8_t count = 0;
|
||||
for (uint8_t i = 0; i < MATRIX_ROWS; i++) {
|
||||
count += bitpop16(matrix[i]);
|
||||
}
|
||||
return count;
|
||||
}
|
||||
|
||||
static void init_cols(void)
|
||||
{
|
||||
// Pro Micro
|
||||
DDRB &= ~(1<<PB0 | 1<<PB1 | 1<<PB2 | 1<<PB3);
|
||||
PORTB |= (1<<PB0 | 1<<PB1 | 1<<PB2 | 1<<PB3);
|
||||
|
||||
DDRD &= ~(1<<PD2 | 1<<PD3);
|
||||
PORTD |= (1<<PD2 | 1<<PD3);
|
||||
|
||||
DDRC &= ~(1<<PC6);
|
||||
PORTC |= (1<<PC6);
|
||||
|
||||
left_init();
|
||||
}
|
||||
|
||||
static matrix_row_t read_cols(uint8_t row)
|
||||
{
|
||||
matrix_row_t cols0 = 0x00, cols1 = 0x00;
|
||||
|
||||
cols0 = left_read_cols();
|
||||
|
||||
cols1 = (PINC&(1<<PC6) ? 0 : (1<<(0+7))) |
|
||||
(PIND&(1<<PD3) ? 0 : (1<<(1+7))) |
|
||||
(PIND&(1<<PD2) ? 0 : (1<<(2+7))) |
|
||||
(PINB&(1<<PB3) ? 0 : (1<<(3+7))) |
|
||||
(PINB&(1<<PB2) ? 0 : (1<<(4+7))) |
|
||||
(PINB&(1<<PB1) ? 0 : (1<<(5+7))) |
|
||||
(PINB&(1<<PB0) ? 0 : (1<<(6+7))) ;
|
||||
|
||||
return (cols0 | cols1);
|
||||
}
|
||||
|
||||
static void unselect_rows(void)
|
||||
{
|
||||
// Pro Micro
|
||||
DDRF &= ~(1<<PF7 | 1<< PF6 | 1<<PF5 | 1<<PF4 | 1<<PF1 | 1<<PF0);
|
||||
PORTF &= ~(1<<PF7 | 1<< PF6 | 1<<PF5 | 1<<PF4 | 1<<PF1 | 1<<PF0);
|
||||
|
||||
left_unselect_rows();
|
||||
}
|
||||
|
||||
static void select_row(uint8_t row)
|
||||
{
|
||||
// Pro Micro
|
||||
switch (row) {
|
||||
case 5:
|
||||
DDRF |= (1<<PF0);
|
||||
PORTF &= ~(1<<PF0);
|
||||
break;
|
||||
case 4:
|
||||
DDRF |= (1<<PF1);
|
||||
PORTF &= ~(1<<PF1);
|
||||
break;
|
||||
case 3:
|
||||
DDRF |= (1<<PF4);
|
||||
PORTF &= ~(1<<PF4);
|
||||
break;
|
||||
case 2:
|
||||
DDRF |= (1<<PF5);
|
||||
PORTF &= ~(1<<PF5);
|
||||
break;
|
||||
case 1:
|
||||
DDRF |= (1<<PF6);
|
||||
PORTF &= ~(1<<PF6);
|
||||
break;
|
||||
case 0:
|
||||
DDRF |= (1<<PF7);
|
||||
PORTF &= ~(1<<PF7);
|
||||
break;
|
||||
}
|
||||
|
||||
left_select_row(row);
|
||||
}
|
||||
|
||||
@@ -1,23 +0,0 @@
|
||||
HotDox
|
||||
========
|
||||
|
||||

|
||||
|
||||
The HotDox is a modified version of the ErgoDox & ErgoDone(made by K.T.E.C.).
|
||||
|
||||
|
||||
- Keyboard maintainer: [Layne](https://github.com/layne001365/qmk_firmware)
|
||||
|
||||
# Building the firmware
|
||||
|
||||
[Install the build tools.](https://docs.qmk.fm/#/getting_started_build_tools)
|
||||
|
||||
In the root directory of the repository, build the firmware with a command like:
|
||||
|
||||
make hotdox:default
|
||||
|
||||
For more information on the layout option and other ones, see the [`make` guide](https://docs.qmk.fm/#/getting_started_make_guide).
|
||||
|
||||
# Flashing the firmware onto the keyboard
|
||||
https://docs.qmk.fm/#/newbs_flashing
|
||||
|
||||
@@ -1,82 +0,0 @@
|
||||
#----------------------------------------------------------------------------
|
||||
# On command line:
|
||||
#
|
||||
# make = Make software.
|
||||
#
|
||||
# make clean = Clean out built project files.
|
||||
#
|
||||
# That's pretty much all you need. To compile, always go make clean,
|
||||
# followed by make.
|
||||
#
|
||||
# For advanced users only:
|
||||
# make teensy = Download the hex file to the device, using teensy_loader_cli.
|
||||
# (must have teensy_loader_cli installed).
|
||||
#
|
||||
#----------------------------------------------------------------------------
|
||||
|
||||
# # project specific files
|
||||
SRC = matrix.c \
|
||||
i2c_master.c \
|
||||
left.c
|
||||
|
||||
# MCU name
|
||||
MCU = atmega32u4
|
||||
|
||||
# Processor frequency.
|
||||
# This will define a symbol, F_CPU, in all source code files equal to the
|
||||
# processor frequency in Hz. You can then use this symbol in your source code to
|
||||
# calculate timings. Do NOT tack on a 'UL' at the end, this will be done
|
||||
# automatically to create a 32-bit value in your source code.
|
||||
#
|
||||
# This will be an integer division of F_USB below, as it is sourced by
|
||||
# F_USB after it has run through any CPU prescalers. Note that this value
|
||||
# does not *change* the processor frequency - it should merely be updated to
|
||||
# reflect the processor speed set externally so that the code can use accurate
|
||||
# software delays.
|
||||
F_CPU = 16000000
|
||||
|
||||
#
|
||||
# LUFA specific
|
||||
#
|
||||
# Target architecture (see library "Board Types" documentation).
|
||||
ARCH = AVR8
|
||||
|
||||
# Input clock frequency.
|
||||
# This will define a symbol, F_USB, in all source code files equal to the
|
||||
# input clock frequency (before any prescaling is performed) in Hz. This value may
|
||||
# differ from F_CPU if prescaling is used on the latter, and is required as the
|
||||
# raw input clock is fed directly to the PLL sections of the AVR for high speed
|
||||
# clock generation for the USB and other AVR subsections. Do NOT tack on a 'UL'
|
||||
# at the end, this will be done automatically to create a 32-bit value in your
|
||||
# source code.
|
||||
#
|
||||
# If no clock division is performed on the input clock inside the AVR (via the
|
||||
# CPU clock adjust registers or the clock division fuses), this will be equal to F_CPU.
|
||||
F_USB = $(F_CPU)
|
||||
|
||||
# Interrupt driven control endpoint task(+60)
|
||||
OPT_DEFS += -DINTERRUPT_CONTROL_ENDPOINT
|
||||
|
||||
# Boot Section
|
||||
BOOTLOADER = atmel-dfu
|
||||
|
||||
# Build Options
|
||||
# comment out to disable the options.
|
||||
#
|
||||
CUSTOM_MATRIX = yes # Custom matrix file for the ErgoDone
|
||||
UNICODE_ENABLE = yes # Unicode
|
||||
BOOTMAGIC_ENABLE = yes # Virtual DIP switch configuration(+1000)
|
||||
MOUSEKEY_ENABLE = yes # Mouse keys(+4700)
|
||||
EXTRAKEY_ENABLE = yes # Audio control and System control(+450)
|
||||
CONSOLE_ENABLE = yes # Console for debug(+400)
|
||||
COMMAND_ENABLE = no # Commands for debug and configuration
|
||||
SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend
|
||||
NKRO_ENABLE = yes # USB Nkey Rollover - not yet supported in LUFA
|
||||
USB_6KRO_ENABLE = no # USB 6key Rollover
|
||||
BACKLIGHT_ENABLE = yes # Enable keyboard backlight functionality
|
||||
KEYMAP_SECTION_ENABLE = no # Fixed address keymap for keymap editor
|
||||
SWAP_HANDS_ENABLE = no # Disable Onehand
|
||||
RGBLIGHT_ENABLE = no
|
||||
MIDI_ENABLE = no
|
||||
|
||||
LAYOUTS = ergodox
|
||||
+206
-209
@@ -1,221 +1,218 @@
|
||||
{
|
||||
"keyboard_name": "KBD19x",
|
||||
"url": "https://github.com/qmk/qmk_firmware/tree/master/keyboards/kbdfans/kbd19x",
|
||||
"url": "https://github.com/qmk/qmk_firmware/tree/master/keyboards/kbd19x",
|
||||
"maintainer": "qmk",
|
||||
"width": 19.5,
|
||||
"height": 6.75,
|
||||
"layouts": {
|
||||
"LAYOUT_ansi": {
|
||||
"key_count": 99,
|
||||
"layout": [
|
||||
{"label":"Esc", "x":0, "y":0},
|
||||
{"label":"F1", "x":1.25, "y":0},
|
||||
{"label":"F2", "x":2.25, "y":0},
|
||||
{"label":"F3", "x":3.25, "y":0},
|
||||
{"label":"F4", "x":4.25, "y":0},
|
||||
{"label":"F5", "x":5.5, "y":0},
|
||||
{"label":"F6", "x":6.5, "y":0},
|
||||
{"label":"F7", "x":7.5, "y":0},
|
||||
{"label":"F8", "x":8.5, "y":0},
|
||||
{"label":"F9", "x":9.75, "y":0},
|
||||
{"label":"F10", "x":10.75, "y":0},
|
||||
{"label":"F11", "x":11.75, "y":0},
|
||||
{"label":"F12", "x":12.75, "y":0},
|
||||
{"label":"Extra Esc", "x":14, "y":0},
|
||||
{"label":"PrtSc", "x":15.5, "y":0},
|
||||
{"label":"Pause", "x":16.5, "y":0},
|
||||
{"label":"Insert", "x":17.5, "y":0},
|
||||
{"label":"Home", "x":18.5, "y":0},
|
||||
{"label":"`~", "x":0, "y":1.5},
|
||||
{"label":"1!", "x":1, "y":1.5},
|
||||
{"label":"2@", "x":2, "y":1.5},
|
||||
{"label":"3#", "x":3, "y":1.5},
|
||||
{"label":"4$", "x":4, "y":1.5},
|
||||
{"label":"5%", "x":5, "y":1.5},
|
||||
{"label":"6^", "x":6, "y":1.5},
|
||||
{"label":"7&", "x":7, "y":1.5},
|
||||
{"label":"8*", "x":8, "y":1.5},
|
||||
{"label":"9(", "x":9, "y":1.5},
|
||||
{"label":"0)", "x":10, "y":1.5},
|
||||
{"label":"-_", "x":11, "y":1.5},
|
||||
{"label":"=+", "x":12, "y":1.5},
|
||||
{"label":"Backspace", "x":13, "y":1.5, "w":2},
|
||||
{"label":"Num Lock", "x":15.5, "y":1.5},
|
||||
{"label":"/", "x":16.5, "y":1.5},
|
||||
{"label":"*", "x":17.5, "y":1.5},
|
||||
{"label":"-", "x":18.5, "y":1.5},
|
||||
{"label":"Tab", "x":0, "y":2.5, "w":1.5},
|
||||
{"label":"Q", "x":1.5, "y":2.5},
|
||||
{"label":"W", "x":2.5, "y":2.5},
|
||||
{"label":"E", "x":3.5, "y":2.5},
|
||||
{"label":"R", "x":4.5, "y":2.5},
|
||||
{"label":"T", "x":5.5, "y":2.5},
|
||||
{"label":"Y", "x":6.5, "y":2.5},
|
||||
{"label":"U", "x":7.5, "y":2.5},
|
||||
{"label":"I", "x":8.5, "y":2.5},
|
||||
{"label":"O", "x":9.5, "y":2.5},
|
||||
{"label":"P", "x":10.5, "y":2.5},
|
||||
{"label":"[{", "x":11.5, "y":2.5},
|
||||
{"label":"]}", "x":12.5, "y":2.5},
|
||||
{"label":"\\|", "x":13.5, "y":2.5, "w":1.5},
|
||||
{"label":"7", "x":15.5, "y":2.5},
|
||||
{"label":"8", "x":16.5, "y":2.5},
|
||||
{"label":"9", "x":17.5, "y":2.5},
|
||||
{"label":"+", "x":18.5, "y":2.5, "h":2},
|
||||
{"label":"Caps Lock", "x":0, "y":3.5, "w":1.75},
|
||||
{"label":"A", "x":1.75, "y":3.5},
|
||||
{"label":"S", "x":2.75, "y":3.5},
|
||||
{"label":"D", "x":3.75, "y":3.5},
|
||||
{"label":"F", "x":4.75, "y":3.5},
|
||||
{"label":"G", "x":5.75, "y":3.5},
|
||||
{"label":"H", "x":6.75, "y":3.5},
|
||||
{"label":"J", "x":7.75, "y":3.5},
|
||||
{"label":"K", "x":8.75, "y":3.5},
|
||||
{"label":"L", "x":9.75, "y":3.5},
|
||||
{"label":";:", "x":10.75, "y":3.5},
|
||||
{"label":"'\"", "x":11.75, "y":3.5},
|
||||
{"label":"Enter", "x":12.75, "y":3.5, "w":2.25},
|
||||
{"label":"4", "x":15.5, "y":3.5},
|
||||
{"label":"5", "x":16.5, "y":3.5},
|
||||
{"label":"6", "x":17.5, "y":3.5},
|
||||
{"label":"Shift", "x":0, "y":4.5, "w":2.25},
|
||||
{"label":"Z", "x":2.25, "y":4.5},
|
||||
{"label":"X", "x":3.25, "y":4.5},
|
||||
{"label":"C", "x":4.25, "y":4.5},
|
||||
{"label":"V", "x":5.25, "y":4.5},
|
||||
{"label":"B", "x":6.25, "y":4.5},
|
||||
{"label":"N", "x":7.25, "y":4.5},
|
||||
{"label":"M", "x":8.25, "y":4.5},
|
||||
{"label":",<", "x":9.25, "y":4.5},
|
||||
{"label":".>", "x":10.25, "y":4.5},
|
||||
{"label":"/?", "x":11.25, "y":4.5},
|
||||
{"label":"Shift", "x":12.25, "y":4.5, "w":1.75},
|
||||
{"label":"Up", "x":14.25, "y":4.75},
|
||||
{"label":"1", "x":15.5, "y":4.5},
|
||||
{"label":"2", "x":16.5, "y":4.5},
|
||||
{"label":"3", "x":17.5, "y":4.5},
|
||||
{"label":"Enter", "x":18.5, "y":4.5, "h":2},
|
||||
{"label":"Control", "x":0, "y":5.5, "w":1.25},
|
||||
{"label":"GUI", "x":1.25, "y":5.5},
|
||||
{"label":"Alt", "x":2.25, "y":5.5, "w":1.25},
|
||||
{"label":"Space", "x":3.5, "y":5.5, "w":6.25},
|
||||
{"label":"Alt", "x":9.75, "y":5.5},
|
||||
{"label":"Fn", "x":10.75, "y":5.5},
|
||||
{"label":"Control", "x":11.75, "y":5.5, "w":1.25},
|
||||
{"label":"Left", "x":13.25, "y":5.75},
|
||||
{"label":"Right", "x":14.25, "y":5.75},
|
||||
{"label":"Down", "x":15.25, "y":5.75},
|
||||
{"label":"0", "x":16.5, "y":5.5},
|
||||
{"label":".", "x":17.5, "y":5.5}
|
||||
]
|
||||
"key_count": 99,
|
||||
"layout": [{"label":"Esc", "x":0, "y":0},
|
||||
{"label":"F1", "x":1.25, "y":0},
|
||||
{"label":"F2", "x":2.25, "y":0},
|
||||
{"label":"F3", "x":3.25, "y":0},
|
||||
{"label":"F4", "x":4.25, "y":0},
|
||||
{"label":"F5", "x":5.5, "y":0},
|
||||
{"label":"F6", "x":6.5, "y":0},
|
||||
{"label":"F7", "x":7.5, "y":0},
|
||||
{"label":"F8", "x":8.5, "y":0},
|
||||
{"label":"F9", "x":9.75, "y":0},
|
||||
{"label":"F10", "x":10.75, "y":0},
|
||||
{"label":"F11", "x":11.75, "y":0},
|
||||
{"label":"F12", "x":12.75, "y":0},
|
||||
{"label":"BkLgt Step", "x":14, "y":0},
|
||||
{"label":"Print Screen", "x":15.5, "y":0},
|
||||
{"label":"Scroll Lock", "x":16.5, "y":0},
|
||||
{"label":"Pause Break", "x":17.5, "y":0},
|
||||
{"label":"PgDn", "x":18.5, "y":0},
|
||||
{"label":"~", "x":0, "y":1.5},
|
||||
{"label":"!", "x":1, "y":1.5},
|
||||
{"label":"@", "x":2, "y":1.5},
|
||||
{"label":"#", "x":3, "y":1.5},
|
||||
{"label":"$", "x":4, "y":1.5},
|
||||
{"label":"%", "x":5, "y":1.5},
|
||||
{"label":"^", "x":6, "y":1.5},
|
||||
{"label":"&", "x":7, "y":1.5},
|
||||
{"label":"*", "x":8, "y":1.5},
|
||||
{"label":"(", "x":9, "y":1.5},
|
||||
{"label":")", "x":10, "y":1.5},
|
||||
{"label":"_", "x":11, "y":1.5},
|
||||
{"label":"+", "x":12, "y":1.5},
|
||||
{"label":"Backspace", "x":13, "y":1.5, "w":2},
|
||||
{"label":"Num Lock", "x":15.5, "y":1.5},
|
||||
{"label":"/", "x":16.5, "y":1.5},
|
||||
{"label":"*", "x":17.5, "y":1.5},
|
||||
{"label":"-", "x":18.5, "y":1.5},
|
||||
{"label":"Tab", "x":0, "y":2.5, "w":1.5},
|
||||
{"label":"Q", "x":1.5, "y":2.5},
|
||||
{"label":"W", "x":2.5, "y":2.5},
|
||||
{"label":"E", "x":3.5, "y":2.5},
|
||||
{"label":"R", "x":4.5, "y":2.5},
|
||||
{"label":"T", "x":5.5, "y":2.5},
|
||||
{"label":"Y", "x":6.5, "y":2.5},
|
||||
{"label":"U", "x":7.5, "y":2.5},
|
||||
{"label":"I", "x":8.5, "y":2.5},
|
||||
{"label":"O", "x":9.5, "y":2.5},
|
||||
{"label":"P", "x":10.5, "y":2.5},
|
||||
{"label":"{", "x":11.5, "y":2.5},
|
||||
{"label":"}", "x":12.5, "y":2.5},
|
||||
{"label":"|", "x":13.5, "y":2.5, "w":1.5},
|
||||
{"label":"7", "x":15.5, "y":2.5},
|
||||
{"label":"8", "x":16.5, "y":2.5},
|
||||
{"label":"9", "x":17.5, "y":2.5},
|
||||
{"label":"+", "x":18.5, "y":2.5, "h":2},
|
||||
{"label":"Caps Lock", "x":0, "y":3.5, "w":1.75},
|
||||
{"label":"A", "x":1.75, "y":3.5},
|
||||
{"label":"S", "x":2.75, "y":3.5},
|
||||
{"label":"D", "x":3.75, "y":3.5},
|
||||
{"label":"F", "x":4.75, "y":3.5},
|
||||
{"label":"G", "x":5.75, "y":3.5},
|
||||
{"label":"H", "x":6.75, "y":3.5},
|
||||
{"label":"J", "x":7.75, "y":3.5},
|
||||
{"label":"K", "x":8.75, "y":3.5},
|
||||
{"label":"L", "x":9.75, "y":3.5},
|
||||
{"label":":", "x":10.75, "y":3.5},
|
||||
{"label":"\"", "x":11.75, "y":3.5},
|
||||
{"label":"Enter", "x":12.75, "y":3.5, "w":2.25},
|
||||
{"label":"4", "x":15.5, "y":3.5},
|
||||
{"label":"5", "x":16.5, "y":3.5},
|
||||
{"label":"6", "x":17.5, "y":3.5},
|
||||
{"label":"Shift", "x":0, "y":4.5, "w":2.25},
|
||||
{"label":"Z", "x":2.25, "y":4.5},
|
||||
{"label":"X", "x":3.25, "y":4.5},
|
||||
{"label":"C", "x":4.25, "y":4.5},
|
||||
{"label":"V", "x":5.25, "y":4.5},
|
||||
{"label":"B", "x":6.25, "y":4.5},
|
||||
{"label":"N", "x":7.25, "y":4.5},
|
||||
{"label":"M", "x":8.25, "y":4.5},
|
||||
{"label":"<", "x":9.25, "y":4.5},
|
||||
{"label":">", "x":10.25, "y":4.5},
|
||||
{"label":"?", "x":11.25, "y":4.5},
|
||||
{"label":"Shift", "x":12.25, "y":4.5, "w":1.75},
|
||||
{"label":"1", "x":15.5, "y":4.5},
|
||||
{"label":"2", "x":16.5, "y":4.5},
|
||||
{"label":"3", "x":17.5, "y":4.5},
|
||||
{"label":"Enter", "x":18.5, "y":4.5, "h":2},
|
||||
{"label":"\u2191", "x":14.25, "y":4.75},
|
||||
{"label":"Ctrl", "x":0, "y":5.5, "w":1.25},
|
||||
{"label":"Win", "x":1.25, "y":5.5},
|
||||
{"label":"Alt", "x":2.25, "y":5.5, "w":1.25},
|
||||
{"x":3.5, "y":5.5, "w":6.25},
|
||||
{"label":"Alt", "x":9.75, "y":5.5},
|
||||
{"label":"MO(1)", "x":10.75, "y":5.5},
|
||||
{"label":"Ctrl", "x":11.75, "y":5.5, "w":1.25},
|
||||
{"label":"0", "x":16.5, "y":5.5},
|
||||
{"label":".", "x":17.5, "y":5.5},
|
||||
{"label":"\u2190", "x":13.25, "y":5.75},
|
||||
{"label":"\u2193", "x":14.25, "y":5.75},
|
||||
{"label":"\u2192", "x":15.25, "y":5.75}]
|
||||
},
|
||||
"LAYOUT_all": {
|
||||
"key_count": 103,
|
||||
"layout": [
|
||||
{"label":"Esc", "x":0, "y":0},
|
||||
{"label":"F1", "x":1.25, "y":0},
|
||||
{"label":"F2", "x":2.25, "y":0},
|
||||
{"label":"F3", "x":3.25, "y":0},
|
||||
{"label":"F4", "x":4.25, "y":0},
|
||||
{"label":"F5", "x":5.5, "y":0},
|
||||
{"label":"F6", "x":6.5, "y":0},
|
||||
{"label":"F7", "x":7.5, "y":0},
|
||||
{"label":"F8", "x":8.5, "y":0},
|
||||
{"label":"F9", "x":9.75, "y":0},
|
||||
{"label":"F10", "x":10.75, "y":0},
|
||||
{"label":"F11", "x":11.75, "y":0},
|
||||
{"label":"F12", "x":12.75, "y":0},
|
||||
{"label":"Extra Esc", "x":14, "y":0},
|
||||
{"label":"PrtSc", "x":15.5, "y":0},
|
||||
{"label":"Pause", "x":16.5, "y":0},
|
||||
{"label":"Insert", "x":17.5, "y":0},
|
||||
{"label":"Home", "x":18.5, "y":0},
|
||||
{"label":"`~", "x":0, "y":1.5},
|
||||
{"label":"1!", "x":1, "y":1.5},
|
||||
{"label":"2@", "x":2, "y":1.5},
|
||||
{"label":"3#", "x":3, "y":1.5},
|
||||
{"label":"4$", "x":4, "y":1.5},
|
||||
{"label":"5%", "x":5, "y":1.5},
|
||||
{"label":"6^", "x":6, "y":1.5},
|
||||
{"label":"7&", "x":7, "y":1.5},
|
||||
{"label":"8*", "x":8, "y":1.5},
|
||||
{"label":"9(", "x":9, "y":1.5},
|
||||
{"label":"0)", "x":10, "y":1.5},
|
||||
{"label":"-_", "x":11, "y":1.5},
|
||||
{"label":"=+", "x":12, "y":1.5},
|
||||
{"label":"Split Backspace (Left)", "x":13, "y":1.5},
|
||||
{"label":"Split Backspace (Right)", "x":14, "y":1.5},
|
||||
{"label":"Num Lock", "x":15.5, "y":1.5},
|
||||
{"label":"/", "x":16.5, "y":1.5},
|
||||
{"label":"*", "x":17.5, "y":1.5},
|
||||
{"label":"-", "x":18.5, "y":1.5},
|
||||
{"label":"Tab", "x":0, "y":2.5, "w":1.5},
|
||||
{"label":"Q", "x":1.5, "y":2.5},
|
||||
{"label":"W", "x":2.5, "y":2.5},
|
||||
{"label":"E", "x":3.5, "y":2.5},
|
||||
{"label":"R", "x":4.5, "y":2.5},
|
||||
{"label":"T", "x":5.5, "y":2.5},
|
||||
{"label":"Y", "x":6.5, "y":2.5},
|
||||
{"label":"U", "x":7.5, "y":2.5},
|
||||
{"label":"I", "x":8.5, "y":2.5},
|
||||
{"label":"O", "x":9.5, "y":2.5},
|
||||
{"label":"P", "x":10.5, "y":2.5},
|
||||
{"label":"[{", "x":11.5, "y":2.5},
|
||||
{"label":"]}", "x":12.5, "y":2.5},
|
||||
{"label":"\\|", "x":13.5, "y":2.5, "w":1.5},
|
||||
{"label":"7", "x":15.5, "y":2.5},
|
||||
{"label":"8", "x":16.5, "y":2.5},
|
||||
{"label":"9", "x":17.5, "y":2.5},
|
||||
{"label":"Split + (Top)", "x":18.5, "y":2.5},
|
||||
{"label":"Caps Lock", "x":0, "y":3.5, "w":1.75},
|
||||
{"label":"A", "x":1.75, "y":3.5},
|
||||
{"label":"S", "x":2.75, "y":3.5},
|
||||
{"label":"D", "x":3.75, "y":3.5},
|
||||
{"label":"F", "x":4.75, "y":3.5},
|
||||
{"label":"G", "x":5.75, "y":3.5},
|
||||
{"label":"H", "x":6.75, "y":3.5},
|
||||
{"label":"J", "x":7.75, "y":3.5},
|
||||
{"label":"K", "x":8.75, "y":3.5},
|
||||
{"label":"L", "x":9.75, "y":3.5},
|
||||
{"label":";:", "x":10.75, "y":3.5},
|
||||
{"label":"'\"", "x":11.75, "y":3.5},
|
||||
{"label":"Enter", "x":12.75, "y":3.5, "w":2.25},
|
||||
{"label":"4", "x":15.5, "y":3.5},
|
||||
{"label":"5", "x":16.5, "y":3.5},
|
||||
{"label":"6", "x":17.5, "y":3.5},
|
||||
{"label":"Split + (Bottom)", "x":18.5, "y":3.5},
|
||||
{"label":"Shift", "x":0, "y":4.5, "w":1.25},
|
||||
{"label":"ISO Backslash", "x":1.25, "y":4.5},
|
||||
{"label":"Z", "x":2.25, "y":4.5},
|
||||
{"label":"X", "x":3.25, "y":4.5},
|
||||
{"label":"C", "x":4.25, "y":4.5},
|
||||
{"label":"V", "x":5.25, "y":4.5},
|
||||
{"label":"B", "x":6.25, "y":4.5},
|
||||
{"label":"N", "x":7.25, "y":4.5},
|
||||
{"label":"M", "x":8.25, "y":4.5},
|
||||
{"label":",<", "x":9.25, "y":4.5},
|
||||
{"label":".>", "x":10.25, "y":4.5},
|
||||
{"label":"/?", "x":11.25, "y":4.5},
|
||||
{"label":"Shift", "x":12.25, "y":4.5, "w":1.75},
|
||||
{"label":"Up", "x":14.25, "y":4.75},
|
||||
{"label":"1", "x":15.5, "y":4.5},
|
||||
{"label":"2", "x":16.5, "y":4.5},
|
||||
{"label":"3", "x":17.5, "y":4.5},
|
||||
{"label":"Split Enter (Top)", "x":18.5, "y":4.5},
|
||||
{"label":"Ctrl", "x":0, "y":5.5, "w":1.25},
|
||||
{"label":"GUI", "x":1.25, "y":5.5},
|
||||
{"label":"Alt", "x":2.25, "y":5.5, "w":1.25},
|
||||
{"label":"Space", "x":3.5, "y":5.5, "w":6.25},
|
||||
{"label":"Alt", "x":9.75, "y":5.5},
|
||||
{"label":"Fn", "x":10.75, "y":5.5},
|
||||
{"label":"Ctrl", "x":11.75, "y":5.5, "w":1.25},
|
||||
{"label":"Left", "x":13.25, "y":5.75},
|
||||
{"label":"Down", "x":14.25, "y":5.75},
|
||||
{"label":"Right", "x":15.25, "y":5.75},
|
||||
{"label":"0", "x":16.5, "y":5.5},
|
||||
{"label":".", "x":17.5, "y":5.5},
|
||||
{"label":"Split Enter (Bottom)", "x":18.5, "y":5.5}
|
||||
]
|
||||
"key_count": 103,
|
||||
"layout": [{"label":"Esc", "x":0, "y":0},
|
||||
{"label":"F1", "x":1.25, "y":0},
|
||||
{"label":"F2", "x":2.25, "y":0},
|
||||
{"label":"F3", "x":3.25, "y":0},
|
||||
{"label":"F4", "x":4.25, "y":0},
|
||||
{"label":"F5", "x":5.5, "y":0},
|
||||
{"label":"F6", "x":6.5, "y":0},
|
||||
{"label":"F7", "x":7.5, "y":0},
|
||||
{"label":"F8", "x":8.5, "y":0},
|
||||
{"label":"F9", "x":9.75, "y":0},
|
||||
{"label":"F10", "x":10.75, "y":0},
|
||||
{"label":"F11", "x":11.75, "y":0},
|
||||
{"label":"F12", "x":12.75, "y":0},
|
||||
{"label":"BkLgt Step", "x":14, "y":0},
|
||||
{"label":"Print Screen", "x":15.5, "y":0},
|
||||
{"label":"Scroll Lock", "x":16.5, "y":0},
|
||||
{"label":"Pause Break", "x":17.5, "y":0},
|
||||
{"label":"PgDn", "x":18.5, "y":0},
|
||||
{"label":"~", "x":0, "y":1.5},
|
||||
{"label":"!", "x":1, "y":1.5},
|
||||
{"label":"@", "x":2, "y":1.5},
|
||||
{"label":"#", "x":3, "y":1.5},
|
||||
{"label":"$", "x":4, "y":1.5},
|
||||
{"label":"%", "x":5, "y":1.5},
|
||||
{"label":"^", "x":6, "y":1.5},
|
||||
{"label":"&", "x":7, "y":1.5},
|
||||
{"label":"*", "x":8, "y":1.5},
|
||||
{"label":"(", "x":9, "y":1.5},
|
||||
{"label":")", "x":10, "y":1.5},
|
||||
{"label":"_", "x":11, "y":1.5},
|
||||
{"label":"+", "x":12, "y":1.5},
|
||||
{"x":13, "y":1.5},
|
||||
{"label":"BS", "x":14, "y":1.5},
|
||||
{"label":"Num Lock", "x":15.5, "y":1.5},
|
||||
{"label":"/", "x":16.5, "y":1.5},
|
||||
{"label":"*", "x":17.5, "y":1.5},
|
||||
{"label":"-", "x":18.5, "y":1.5},
|
||||
{"label":"Tab", "x":0, "y":2.5, "w":1.5},
|
||||
{"label":"Q", "x":1.5, "y":2.5},
|
||||
{"label":"W", "x":2.5, "y":2.5},
|
||||
{"label":"E", "x":3.5, "y":2.5},
|
||||
{"label":"R", "x":4.5, "y":2.5},
|
||||
{"label":"T", "x":5.5, "y":2.5},
|
||||
{"label":"Y", "x":6.5, "y":2.5},
|
||||
{"label":"U", "x":7.5, "y":2.5},
|
||||
{"label":"I", "x":8.5, "y":2.5},
|
||||
{"label":"O", "x":9.5, "y":2.5},
|
||||
{"label":"P", "x":10.5, "y":2.5},
|
||||
{"label":"{", "x":11.5, "y":2.5},
|
||||
{"label":"}", "x":12.5, "y":2.5},
|
||||
{"label":"|", "x":13.5, "y":2.5, "w":1.5},
|
||||
{"label":"7", "x":15.5, "y":2.5},
|
||||
{"label":"8", "x":16.5, "y":2.5},
|
||||
{"label":"9", "x":17.5, "y":2.5},
|
||||
{"label":"+", "x":18.5, "y":2.5},
|
||||
{"label":"Caps Lock", "x":0, "y":3.5, "w":1.75},
|
||||
{"label":"A", "x":1.75, "y":3.5},
|
||||
{"label":"S", "x":2.75, "y":3.5},
|
||||
{"label":"D", "x":3.75, "y":3.5},
|
||||
{"label":"F", "x":4.75, "y":3.5},
|
||||
{"label":"G", "x":5.75, "y":3.5},
|
||||
{"label":"H", "x":6.75, "y":3.5},
|
||||
{"label":"J", "x":7.75, "y":3.5},
|
||||
{"label":"K", "x":8.75, "y":3.5},
|
||||
{"label":"L", "x":9.75, "y":3.5},
|
||||
{"label":":", "x":10.75, "y":3.5},
|
||||
{"label":"\"", "x":11.75, "y":3.5},
|
||||
{"label":"Enter", "x":12.75, "y":3.5, "w":2.25},
|
||||
{"label":"4", "x":15.5, "y":3.5},
|
||||
{"label":"5", "x":16.5, "y":3.5},
|
||||
{"label":"6", "x":17.5, "y":3.5},
|
||||
{"x":18.5, "y":3.5},
|
||||
{"label":"Shift", "x":0, "y":4.5, "w":1.25},
|
||||
{"x":1.25, "y":4.5},
|
||||
{"label":"Z", "x":2.25, "y":4.5},
|
||||
{"label":"X", "x":3.25, "y":4.5},
|
||||
{"label":"C", "x":4.25, "y":4.5},
|
||||
{"label":"V", "x":5.25, "y":4.5},
|
||||
{"label":"B", "x":6.25, "y":4.5},
|
||||
{"label":"N", "x":7.25, "y":4.5},
|
||||
{"label":"M", "x":8.25, "y":4.5},
|
||||
{"label":"<", "x":9.25, "y":4.5},
|
||||
{"label":">", "x":10.25, "y":4.5},
|
||||
{"label":"?", "x":11.25, "y":4.5},
|
||||
{"label":"Shift", "x":12.25, "y":4.5, "w":1.75},
|
||||
{"label":"1", "x":15.5, "y":4.5},
|
||||
{"label":"2", "x":16.5, "y":4.5},
|
||||
{"label":"3", "x":17.5, "y":4.5},
|
||||
{"label":"Enter", "x":18.5, "y":4.5},
|
||||
{"label":"\u2191", "x":14.25, "y":4.75},
|
||||
{"label":"Ctrl", "x":0, "y":5.5, "w":1.25},
|
||||
{"label":"Win", "x":1.25, "y":5.5},
|
||||
{"label":"Alt", "x":2.25, "y":5.5, "w":1.25},
|
||||
{"x":3.5, "y":5.5, "w":6.25},
|
||||
{"label":"Alt", "x":9.75, "y":5.5},
|
||||
{"label":"Menu", "x":10.75, "y":5.5},
|
||||
{"label":"Ctrl", "x":11.75, "y":5.5, "w":1.25},
|
||||
{"label":"0", "x":16.5, "y":5.5},
|
||||
{"label":".", "x":17.5, "y":5.5},
|
||||
{"x":18.5, "y":5.5},
|
||||
{"label":"\u2190", "x":13.25, "y":5.75},
|
||||
{"label":"\u2193", "x":14.25, "y":5.75},
|
||||
{"label":"\u2192", "x":15.25, "y":5.75}]
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
@@ -169,201 +169,6 @@
|
||||
{"label":"Down", "x":15, "y":4},
|
||||
{"label":"Right", "x":16, "y":4}
|
||||
]
|
||||
},
|
||||
"LAYOUT_60_with_macro": {
|
||||
"layout": [
|
||||
{"label":"F1", "x":0, "y":0},
|
||||
{"label":"F6", "x":1, "y":0},
|
||||
|
||||
{"label":"Esc", "x":2.25, "y":0},
|
||||
{"label":"1", "x":3.25, "y":0},
|
||||
{"label":"2", "x":4.25, "y":0},
|
||||
{"label":"3", "x":5.25, "y":0},
|
||||
{"label":"4", "x":6.25, "y":0},
|
||||
{"label":"5", "x":7.25, "y":0},
|
||||
{"label":"6", "x":8.25, "y":0},
|
||||
|
||||
{"label":"7", "x":10.25, "y":0},
|
||||
{"label":"8", "x":11.25, "y":0},
|
||||
{"label":"9", "x":12.25, "y":0},
|
||||
{"label":"0", "x":13.25, "y":0},
|
||||
{"label":"-", "x":14.25, "y":0},
|
||||
{"label":"=", "x":15.25, "y":0},
|
||||
{"label":"Del", "x":16.25, "y":0},
|
||||
{"label":"Bksp", "x":17.25, "y":0},
|
||||
|
||||
{"label":"F2", "x":0, "y":1},
|
||||
{"label":"F7", "x":1, "y":1},
|
||||
|
||||
{"label":"Tab", "x":2.25, "y":1, "w":1.5},
|
||||
{"label":"Q", "x":3.75, "y":1},
|
||||
{"label":"W", "x":4.75, "y":1},
|
||||
{"label":"E", "x":5.75, "y":1},
|
||||
{"label":"R", "x":6.75, "y":1},
|
||||
{"label":"T", "x":7.75, "y":1},
|
||||
|
||||
{"label":"Y", "x":9.75, "y":1},
|
||||
{"label":"U", "x":10.75, "y":1},
|
||||
{"label":"I", "x":11.75, "y":1},
|
||||
{"label":"O", "x":12.75, "y":1},
|
||||
{"label":"P", "x":13.75, "y":1},
|
||||
{"label":"{", "x":14.75, "y":1},
|
||||
{"label":"}", "x":15.75, "y":1},
|
||||
{"label":"Backslash", "x":16.75, "y":1, "w":1.5},
|
||||
|
||||
{"label":"F3", "x":0, "y":2},
|
||||
{"label":"F8", "x":1, "y":2},
|
||||
|
||||
{"label":"Caps Lock", "x":2.25, "y":2, "w":1.75},
|
||||
{"label":"A", "x":4, "y":2},
|
||||
{"label":"S", "x":5, "y":2},
|
||||
{"label":"D", "x":6, "y":2},
|
||||
{"label":"F", "x":7, "y":2},
|
||||
{"label":"G", "x":8, "y":2},
|
||||
|
||||
{"label":"H", "x":10, "y":2},
|
||||
{"label":"J", "x":11, "y":2},
|
||||
{"label":"K", "x":12, "y":2},
|
||||
{"label":"L", "x":13, "y":2},
|
||||
{"label":":", "x":14, "y":2},
|
||||
{"label":"\"", "x":15, "y":2},
|
||||
{"label":"Enter", "x":16, "y":2, "w":2.25},
|
||||
|
||||
{"label":"F4", "x":0, "y":3},
|
||||
{"label":"F9", "x":1, "y":3},
|
||||
|
||||
{"label":"Shift", "x":2.25, "y":3, "w":2.25},
|
||||
{"label":"Z", "x":4.5, "y":3},
|
||||
{"label":"X", "x":5.5, "y":3},
|
||||
{"label":"C", "x":6.5, "y":3},
|
||||
{"label":"V", "x":7.5, "y":3},
|
||||
{"label":"B", "x":8.5, "y":3},
|
||||
|
||||
{"label":"N", "x":10.5, "y":3},
|
||||
{"label":"M", "x":11.5, "y":3},
|
||||
{"label":",", "x":12.5, "y":3},
|
||||
{"label":".", "x":13.5, "y":3},
|
||||
{"label":"/", "x":14.5, "y":3},
|
||||
{"label":"Shift", "x":15.5, "y":3, "w":1.75},
|
||||
{"label":"Fn", "x":17.25, "y":3},
|
||||
|
||||
{"label":"F5", "x":0, "y":4},
|
||||
{"label":"F10", "x":1, "y":4},
|
||||
|
||||
{"label":"Ctrl", "x":2.25, "y":4, "w":1.25},
|
||||
{"label":"Win", "x":3.5, "y":4, "w":1.25},
|
||||
{"label":"Alt", "x":4.75, "y":4, "w":1.25},
|
||||
{"label":"Fn", "x":6, "y":4, "w":1.25},
|
||||
{"label":"Space", "x":7.25, "y":4, "w":2.25},
|
||||
|
||||
{"label":"Fn", "x":10.5, "y":4, "w":1.25},
|
||||
{"label":"Space", "x":11.75, "y":4, "w":1.5},
|
||||
{"label":"Alt", "x":13.25, "y":4},
|
||||
{"label":"Ctrl", "x":14.25, "y":4},
|
||||
{"label":"Left", "x":15.25, "y":4},
|
||||
{"label":"Down", "x":16.25, "y":4},
|
||||
{"label":"Right", "x":17.25, "y":4}
|
||||
]
|
||||
},
|
||||
"LAYOUT_65_with_macro": {
|
||||
"layout": [
|
||||
{"label":"F1", "x":0, "y":0},
|
||||
{"label":"F6", "x":1, "y":0},
|
||||
|
||||
{"label":"Esc", "x":2.25, "y":0},
|
||||
{"label":"1", "x":3.25, "y":0},
|
||||
{"label":"2", "x":4.25, "y":0},
|
||||
{"label":"3", "x":5.25, "y":0},
|
||||
{"label":"4", "x":6.25, "y":0},
|
||||
{"label":"5", "x":7.25, "y":0},
|
||||
{"label":"6", "x":8.25, "y":0},
|
||||
|
||||
{"label":"7", "x":10.25, "y":0},
|
||||
{"label":"8", "x":11.25, "y":0},
|
||||
{"label":"9", "x":12.25, "y":0},
|
||||
{"label":"0", "x":13.25, "y":0},
|
||||
{"label":"-", "x":14.25, "y":0},
|
||||
{"label":"=", "x":15.25, "y":0},
|
||||
{"label":"=", "x":16.25, "y":0},
|
||||
{"label":"Bksp", "x":17.25, "y":0},
|
||||
{"label":"Home", "x":18.25, "y":0},
|
||||
|
||||
{"label":"F2", "x":0, "y":1},
|
||||
{"label":"F7", "x":1, "y":1},
|
||||
|
||||
{"label":"Tab", "x":2.25, "y":1, "w":1.5},
|
||||
{"label":"Q", "x":3.75, "y":1},
|
||||
{"label":"W", "x":4.75, "y":1},
|
||||
{"label":"E", "x":5.75, "y":1},
|
||||
{"label":"R", "x":6.75, "y":1},
|
||||
{"label":"T", "x":7.75, "y":1},
|
||||
|
||||
{"label":"Y", "x":9.75, "y":1},
|
||||
{"label":"U", "x":10.75, "y":1},
|
||||
{"label":"I", "x":11.75, "y":1},
|
||||
{"label":"O", "x":12.75, "y":1},
|
||||
{"label":"P", "x":13.75, "y":1},
|
||||
{"label":"{", "x":14.75, "y":1},
|
||||
{"label":"}", "x":15.75, "y":1},
|
||||
{"label":"|", "x":16.75, "y":1, "w":1.5},
|
||||
{"label":"PgUp", "x":18.25, "y":1},
|
||||
|
||||
{"label":"F3", "x":0, "y":2},
|
||||
{"label":"F8", "x":1, "y":2},
|
||||
|
||||
{"label":"Caps Lock", "x":2.25, "y":2, "w":1.75},
|
||||
{"label":"A", "x":4, "y":2},
|
||||
{"label":"S", "x":5, "y":2},
|
||||
{"label":"D", "x":6, "y":2},
|
||||
{"label":"F", "x":7, "y":2},
|
||||
{"label":"G", "x":8, "y":2},
|
||||
|
||||
{"label":"H", "x":10, "y":2},
|
||||
{"label":"J", "x":11, "y":2},
|
||||
{"label":"K", "x":12, "y":2},
|
||||
{"label":"L", "x":13, "y":2},
|
||||
{"label":":", "x":14, "y":2},
|
||||
{"label":"\"", "x":15, "y":2},
|
||||
{"label":"Enter", "x":16, "y":2, "w":2.25},
|
||||
{"label":"PgDn", "x":18.25, "y":2},
|
||||
|
||||
{"label":"F4", "x":0, "y":3},
|
||||
{"label":"F9", "x":1, "y":3},
|
||||
|
||||
{"label":"Shift", "x":2.25, "y":3, "w":2.25},
|
||||
{"label":"Z", "x":4.5, "y":3},
|
||||
{"label":"X", "x":5.5, "y":3},
|
||||
{"label":"C", "x":6.5, "y":3},
|
||||
{"label":"V", "x":7.5, "y":3},
|
||||
{"label":"B", "x":8.5, "y":3},
|
||||
|
||||
{"label":"N", "x":10.5, "y":3},
|
||||
{"label":"M", "x":11.5, "y":3},
|
||||
{"label":",", "x":12.5, "y":3},
|
||||
{"label":".", "x":13.5, "y":3},
|
||||
{"label":"/", "x":14.5, "y":3},
|
||||
{"label":"Shift", "x":15.5, "y":3, "w":1.75},
|
||||
{"label":"Up", "x":17.25, "y":3},
|
||||
{"label":"End", "x":18.25, "y":3},
|
||||
|
||||
{"label":"F5", "x":0, "y":4},
|
||||
{"label":"F10", "x":1, "y":4},
|
||||
|
||||
{"label":"Ctrl", "x":2.25, "y":4, "w":1.25},
|
||||
{"label":"Win", "x":3.5, "y":4, "w":1.25},
|
||||
{"label":"Alt", "x":4.75, "y":4, "w":1.25},
|
||||
{"label":"Fn", "x":6, "y":4, "w":1.25},
|
||||
{"label":"Space", "x":7.25, "y":4, "w":2.25},
|
||||
|
||||
{"label":"Fn", "x":10.5, "y":4, "w":1.25},
|
||||
{"label":"Space", "x":11.75, "y":4, "w":1.5},
|
||||
{"label":"Alt", "x":13.25, "y":4},
|
||||
{"label":"Ctrl", "x":14.25, "y":4},
|
||||
{"label":"Win", "x":15.25, "y":4},
|
||||
{"label":"Left", "x":16.25, "y":4},
|
||||
{"label":"Down", "x":17.25, "y":4},
|
||||
{"label":"Right", "x":18.25, "y":4}
|
||||
]
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
@@ -1,9 +0,0 @@
|
||||
#pragma once
|
||||
|
||||
/* Underlight Configuration */
|
||||
#define RGB_DI_PIN F4
|
||||
#define RGBLIGHT_ANIMATIONS
|
||||
#define RGBLED_NUM 2 // Number of LEDs
|
||||
#define RGBLIGHT_HUE_STEP 10
|
||||
#define RGBLIGHT_SAT_STEP 17
|
||||
#define RGBLIGHT_VAL_STEP 17
|
||||
@@ -1,76 +0,0 @@
|
||||
// Below layout is based upon /u/That-Canadian's planck layout
|
||||
#include QMK_KEYBOARD_H
|
||||
|
||||
extern keymap_config_t keymap_config;
|
||||
|
||||
// Each layer gets a name for readability, which is then used in the keymap matrix below.
|
||||
// The underscores don't mean anything - you can have a layer called STUFF or any other name.
|
||||
// Layer names don't all need to be of the same length, obviously, and you can also skip them
|
||||
// entirely and just use numbers.
|
||||
#define _QWERTY 0
|
||||
#define _RGB 1
|
||||
#define _FUNC 15
|
||||
|
||||
// Defines for task manager and such
|
||||
#define CALTDEL LCTL(LALT(KC_DEL))
|
||||
#define TSKMGR LCTL(LSFT(KC_ESC))
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
|
||||
/* Qwerty
|
||||
* ,-------------.
|
||||
* | 1 | 2 |
|
||||
* |------+------|
|
||||
* | 3 | 4 |
|
||||
* |------+------|
|
||||
* | 5 | 6 |
|
||||
* |------+------|
|
||||
* | FUNC | RGB |
|
||||
* `-------------'
|
||||
*/
|
||||
[_QWERTY] = LAYOUT( \
|
||||
KC_1, KC_2, \
|
||||
KC_3, KC_4, \
|
||||
KC_5, KC_6, \
|
||||
MO(_FUNC), TG(_RGB) \
|
||||
),
|
||||
|
||||
/* RGB
|
||||
* ,-------------.
|
||||
* | Mode-| Mode+|
|
||||
* |------+------|
|
||||
* | HUE- | HUE+ |
|
||||
* |------+------|
|
||||
* | SAT- | SAT+ |
|
||||
* |------+------|
|
||||
* |RGBTOG| |
|
||||
* `-------------'
|
||||
*/
|
||||
[_RGB] = LAYOUT( \
|
||||
RGB_RMOD, RGB_MOD, \
|
||||
RGB_HUD, RGB_HUI, \
|
||||
RGB_SAD, RGB_SAI, \
|
||||
RGB_TOG, KC_TRNS \
|
||||
),
|
||||
|
||||
/* Function
|
||||
* ,-------------.
|
||||
* | Q |CALDEL|
|
||||
* |------+------|
|
||||
* | A |TSKMGR|
|
||||
* |------+------|
|
||||
* | Z | X |
|
||||
* |------+------|
|
||||
* | | C |
|
||||
* `-------------'
|
||||
*/
|
||||
[_FUNC] = LAYOUT( \
|
||||
KC_Q, CALTDEL, \
|
||||
KC_A, TSKMGR, \
|
||||
KC_Z, KC_X, \
|
||||
_______, KC_C \
|
||||
)
|
||||
|
||||
};
|
||||
|
||||
void matrix_init_user(void) {}
|
||||
@@ -1,41 +0,0 @@
|
||||
# Launch Pad
|
||||
|
||||

|
||||
|
||||
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-
|
||||
|
||||
A budget-minded, 4-8 key macro-pad with built in legs, plate & case.
|
||||
|
||||
Supports MX & Alps switches. 2x 1u or 1x 2u supported for each row.
|
||||
|
||||
Supports 2u PCB-Mount stabilizers.
|
||||
|
||||
Runs off of 1x Pro Micro & 8x diodes (1n4148).
|
||||
|
||||
Optional "Reset" switch can be used on the PCB.
|
||||
|
||||
A fantastic project for beginners to learn to solder, veteran's of the hobby who want to add an easy macro-pad to their collection, and everyone in between.
|
||||
|
||||
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
make launchpad/rev1:default
|
||||
|
||||
See [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) then the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information.
|
||||
|
||||
# Under Glow
|
||||
|
||||

|
||||
|
||||
SpaceCat now provides an underglow add-on kit. Please refer to the picture above for wiring.
|
||||
|
||||
Make example for this keyboard (after setting up your build environment):
|
||||
|
||||
make launchpad/rev1:default_rgb
|
||||
|
||||
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-
|
||||
|
||||
Due to PCB tolerance issues outside of our control, the snap-apart legs included on the PCB may need extra padding to prevent a small amount of wobbling once placed properly. We have included small, clear, and semi-permanent "glue dots" in each order (PCB Only -and- Full Kit) to help with this. You may also use plastic wrap, tape, Elmer's glue, hot glue, rubber cement, etc. We advise against using anything more "permanent" in case you wish to make changes to your Launch Pad in the future. It is also best to attach legs after all of your soldering and building is finished, to get the most accurate feel for your Launch Pad.
|
||||
|
||||
-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-
|
||||
@@ -1 +0,0 @@
|
||||
RGBLIGHT_ENABLE = yes # Enable WS2812 RGB underlight.
|
||||
@@ -19,7 +19,6 @@
|
||||
|
||||
const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = {
|
||||
[_QW] = LAYOUT_planck_grid_wrapper(QWERTY_4x12),
|
||||
[_GAME] = LAYOUT_planck_grid_wrapper(GAME_4x12),
|
||||
[_LW] = LAYOUT_planck_grid_wrapper(LOWER_4x12),
|
||||
[_NV] = LAYOUT_planck_grid_wrapper(NAV_4x12),
|
||||
[_NP] = LAYOUT_planck_grid_wrapper(NUMPAD_4x12),
|
||||
@@ -31,4 +30,4 @@ void rgb_matrix_indicators_user(void) {
|
||||
// Disable light in middle of 2U position
|
||||
rgb_matrix_set_color(42, 0, 0, 0);
|
||||
}
|
||||
#endif
|
||||
#endif
|
||||
@@ -1,204 +0,0 @@
|
||||
|
||||
|
||||
#pragma once
|
||||
|
||||
#include "config_common.h"
|
||||
|
||||
/* USB Device descriptor parameter */
|
||||
#define VENDOR_ID 0xF7E0
|
||||
#define PRODUCT_ID 0x0412
|
||||
#define DEVICE_VER 0x0003
|
||||
#define MANUFACTURER Fate Everywhere
|
||||
#define PRODUCT Stand Aside
|
||||
#define DESCRIPTION A compact 60% keyboard
|
||||
|
||||
/* key matrix size */
|
||||
#define MATRIX_ROWS 8
|
||||
#define MATRIX_COLS 8
|
||||
|
||||
/*
|
||||
* Keyboard Matrix Assignments
|
||||
*
|
||||
* Change this to how you wired your keyboard
|
||||
* COLS: AVR pins used for columns, left to right
|
||||
* ROWS: AVR pins used for rows, top to bottom
|
||||
* DIODE_DIRECTION: COL2ROW = COL = Anode (+), ROW = Cathode (-, marked on diode)
|
||||
* ROW2COL = ROW = Anode (+), COL = Cathode (-, marked on diode)
|
||||
*
|
||||
*/
|
||||
#define MATRIX_ROW_PINS { D1, F4, F6, F7, B1, B3, B2, B6 }
|
||||
#define MATRIX_COL_PINS { F5, D0, D4, C6, D7, E6, B4, B5 }
|
||||
#define UNUSED_PINS {}
|
||||
|
||||
|
||||
/* COL2ROW, ROW2COL, or CUSTOM_MATRIX */
|
||||
#define DIODE_DIRECTION COL2ROW
|
||||
|
||||
// #define BACKLIGHT_PIN C7
|
||||
// #define BACKLIGHT_BREATHING
|
||||
// #define BACKLIGHT_LEVELS 3
|
||||
|
||||
|
||||
/* Debounce reduces chatter (unintended double-presses) - set 0 if debouncing is not needed */
|
||||
#define DEBOUNCING_DELAY 5
|
||||
|
||||
/* define if matrix has ghost (lacks anti-ghosting diodes) */
|
||||
//#define MATRIX_HAS_GHOST
|
||||
|
||||
/* number of backlight levels */
|
||||
|
||||
/* Mechanical locking support. Use KC_LCAP, KC_LNUM or KC_LSCR instead in keymap */
|
||||
#define LOCKING_SUPPORT_ENABLE
|
||||
/* Locking resynchronize hack */
|
||||
#define LOCKING_RESYNC_ENABLE
|
||||
|
||||
/*
|
||||
* Enable RGB Underlighting
|
||||
*/
|
||||
#define RGB_DI_PIN C7
|
||||
#define RGBLED_NUM 12
|
||||
#define RGBLIGHT_ANIMATIONS
|
||||
|
||||
/* If defined, GRAVE_ESC will always act as ESC when CTRL is held.
|
||||
* This is userful for the Windows task manager shortcut (ctrl+shift+esc).
|
||||
*/
|
||||
// #define GRAVE_ESC_CTRL_OVERRIDE
|
||||
|
||||
/*
|
||||
* Force NKRO
|
||||
*
|
||||
* Force NKRO (nKey Rollover) to be enabled by default, regardless of the saved
|
||||
* state in the bootmagic EEPROM settings. (Note that NKRO must be enabled in the
|
||||
* makefile for this to work.)
|
||||
*
|
||||
* If forced on, NKRO can be disabled via magic key (default = LShift+RShift+N)
|
||||
* until the next keyboard reset.
|
||||
*
|
||||
* NKRO may prevent your keystrokes from being detected in the BIOS, but it is
|
||||
* fully operational during normal computer usage.
|
||||
*
|
||||
* For a less heavy-handed approach, enable NKRO via magic key (LShift+RShift+N)
|
||||
* or via bootmagic (hold SPACE+N while plugging in the keyboard). Once set by
|
||||
* bootmagic, NKRO mode will always be enabled until it is toggled again during a
|
||||
* power-up.
|
||||
*
|
||||
*/
|
||||
//#define FORCE_NKRO
|
||||
|
||||
/*
|
||||
* Magic Key Options
|
||||
*
|
||||
* Magic keys are hotkey commands that allow control over firmware functions of
|
||||
* the keyboard. They are best used in combination with the HID Listen program,
|
||||
* found here: https://www.pjrc.com/teensy/hid_listen.html
|
||||
*
|
||||
* The options below allow the magic key functionality to be changed. This is
|
||||
* useful if your keyboard/keypad is missing keys and you want magic key support.
|
||||
*
|
||||
*/
|
||||
|
||||
/* control how magic key switches layers */
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_FKEYS true
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_NKEYS true
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_CUSTOM false
|
||||
|
||||
/* override magic key keymap */
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_FKEYS
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_NKEYS
|
||||
//#define MAGIC_KEY_SWITCH_LAYER_WITH_CUSTOM
|
||||
//#define MAGIC_KEY_HELP1 H
|
||||
//#define MAGIC_KEY_HELP2 SLASH
|
||||
//#define MAGIC_KEY_DEBUG D
|
||||
//#define MAGIC_KEY_DEBUG_MATRIX X
|
||||
//#define MAGIC_KEY_DEBUG_KBD K
|
||||
//#define MAGIC_KEY_DEBUG_MOUSE M
|
||||
//#define MAGIC_KEY_VERSION V
|
||||
//#define MAGIC_KEY_STATUS S
|
||||
//#define MAGIC_KEY_CONSOLE C
|
||||
//#define MAGIC_KEY_LAYER0_ALT1 ESC
|
||||
//#define MAGIC_KEY_LAYER0_ALT2 GRAVE
|
||||
//#define MAGIC_KEY_LAYER0 0
|
||||
//#define MAGIC_KEY_LAYER1 1
|
||||
//#define MAGIC_KEY_LAYER2 2
|
||||
//#define MAGIC_KEY_LAYER3 3
|
||||
//#define MAGIC_KEY_LAYER4 4
|
||||
//#define MAGIC_KEY_LAYER5 5
|
||||
//#define MAGIC_KEY_LAYER6 6
|
||||
//#define MAGIC_KEY_LAYER7 7
|
||||
//#define MAGIC_KEY_LAYER8 8
|
||||
//#define MAGIC_KEY_LAYER9 9
|
||||
//#define MAGIC_KEY_BOOTLOADER PAUSE
|
||||
//#define MAGIC_KEY_LOCK CAPS
|
||||
//#define MAGIC_KEY_EEPROM E
|
||||
//#define MAGIC_KEY_NKRO N
|
||||
//#define MAGIC_KEY_SLEEP_LED Z
|
||||
|
||||
/*
|
||||
* Feature disable options
|
||||
* These options are also useful to firmware size reduction.
|
||||
*/
|
||||
|
||||
/* disable debug print */
|
||||
//#define NO_DEBUG
|
||||
|
||||
/* disable print */
|
||||
//#define NO_PRINT
|
||||
|
||||
/* disable action features */
|
||||
//#define NO_ACTION_LAYER
|
||||
//#define NO_ACTION_TAPPING
|
||||
//#define NO_ACTION_ONESHOT
|
||||
//#define NO_ACTION_MACRO
|
||||
//#define NO_ACTION_FUNCTION
|
||||
|
||||
/*
|
||||
* MIDI options
|
||||
*/
|
||||
|
||||
/* Prevent use of disabled MIDI features in the keymap */
|
||||
//#define MIDI_ENABLE_STRICT 1
|
||||
|
||||
/* enable basic MIDI features:
|
||||
- MIDI notes can be sent when in Music mode is on
|
||||
*/
|
||||
//#define MIDI_BASIC
|
||||
|
||||
/* enable advanced MIDI features:
|
||||
- MIDI notes can be added to the keymap
|
||||
- Octave shift and transpose
|
||||
- Virtual sustain, portamento, and modulation wheel
|
||||
- etc.
|
||||
*/
|
||||
//#define MIDI_ADVANCED
|
||||
|
||||
/* override number of MIDI tone keycodes (each octave adds 12 keycodes and allocates 12 bytes) */
|
||||
//#define MIDI_TONE_KEYCODE_OCTAVES 1
|
||||
|
||||
/*
|
||||
* HD44780 LCD Display Configuration
|
||||
*/
|
||||
/*
|
||||
#define LCD_LINES 2 //< number of visible lines of the display
|
||||
#define LCD_DISP_LENGTH 16 //< visibles characters per line of the display
|
||||
|
||||
#define LCD_IO_MODE 1 //< 0: memory mapped mode, 1: IO port mode
|
||||
|
||||
#if LCD_IO_MODE
|
||||
#define LCD_PORT PORTB //< port for the LCD lines
|
||||
#define LCD_DATA0_PORT LCD_PORT //< port for 4bit data bit 0
|
||||
#define LCD_DATA1_PORT LCD_PORT //< port for 4bit data bit 1
|
||||
#define LCD_DATA2_PORT LCD_PORT //< port for 4bit data bit 2
|
||||
#define LCD_DATA3_PORT LCD_PORT //< port for 4bit data bit 3
|
||||
#define LCD_DATA0_PIN 4 //< pin for 4bit data bit 0
|
||||
#define LCD_DATA1_PIN 5 //< pin for 4bit data bit 1
|
||||
#define LCD_DATA2_PIN 6 //< pin for 4bit data bit 2
|
||||
#define LCD_DATA3_PIN 7 //< pin for 4bit data bit 3
|
||||
#define LCD_RS_PORT LCD_PORT //< port for RS line
|
||||
#define LCD_RS_PIN 3 //< pin for RS line
|
||||
#define LCD_RW_PORT LCD_PORT //< port for RW line
|
||||
#define LCD_RW_PIN 2 //< pin for RW line
|
||||
#define LCD_E_PORT LCD_PORT //< port for Enable line
|
||||
#define LCD_E_PIN 1 //< pin for Enable line
|
||||
#endif
|
||||
*/
|
||||
|
||||
@@ -1,5 +0,0 @@
|
||||
|
||||
|
||||
#pragma once
|
||||
|
||||
// place overrides here
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user